

SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
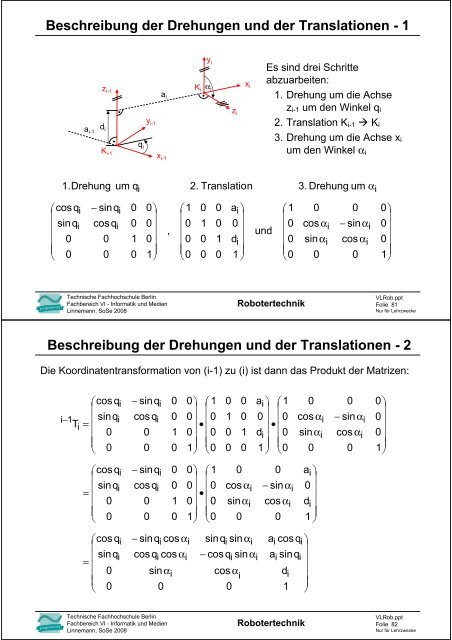
Beschreibung <strong>de</strong>r Drehungen und <strong>de</strong>r Translationen - 1<br />
z i-1<br />
y i-1<br />
a i-1<br />
q i<br />
K i-1<br />
x i-1<br />
y i<br />
K i<br />
α i<br />
d i<br />
a i<br />
z i<br />
x i<br />
Es sind drei Schritte<br />
abzuarbeiten:<br />
1. Drehung um die Achse<br />
z i-1 um <strong>de</strong>n Winkel q i<br />
2. Translation K i-1 K i<br />
3. Drehung um die Achse x i<br />
um <strong>de</strong>n Winkel α i<br />
1.Drehung<br />
um qi<br />
2. Translation<br />
3. Drehung um<br />
αi<br />
⎛cos qi<br />
⎜<br />
⎜ sinqi<br />
⎜ 0<br />
⎜<br />
⎝ 0<br />
− sinqi<br />
cos qi<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
0⎟<br />
⎟<br />
1⎠<br />
,<br />
⎛ 1<br />
⎜<br />
⎜0<br />
⎜0<br />
⎜<br />
⎝0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
ai<br />
⎞<br />
⎟<br />
0 ⎟<br />
d ⎟<br />
i<br />
⎟<br />
1 ⎠<br />
und<br />
⎛ 1<br />
⎜<br />
⎜0<br />
⎜0<br />
⎜<br />
⎝0<br />
0<br />
cos αi<br />
sinαi<br />
0<br />
0<br />
− sinαi<br />
cos αi<br />
0<br />
0⎞<br />
0<br />
0<br />
1<br />
⎟ ⎟⎟⎟⎟ ⎠<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 81<br />
Nur für Lehrzwecke<br />
Beschreibung <strong>de</strong>r Drehungen und <strong>de</strong>r Translationen - 2<br />
Die Koordinatentransformation von (i-1) zu (i) ist dann das Produkt <strong>de</strong>r Matrizen:<br />
i−1<br />
Ti<br />
⎛cos qi<br />
⎜<br />
⎜ sinqi<br />
=<br />
⎜ 0<br />
⎜<br />
⎝ 0<br />
− sinqi<br />
cos qi<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎞<br />
⎛ 1<br />
⎟ ⎜<br />
0⎟<br />
⎜0<br />
⎟<br />
•<br />
0 ⎜0<br />
⎟<br />
⎜<br />
1⎠<br />
⎝0<br />
0<br />
1<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
ai<br />
⎞ ⎛ 1<br />
⎟ ⎜<br />
0 ⎟ ⎜0<br />
⎟<br />
•<br />
d ⎜<br />
i 0<br />
⎟<br />
⎜<br />
1 ⎠ ⎝0<br />
0<br />
cos αi<br />
sinαi<br />
0<br />
0<br />
− sinαi<br />
cos αi<br />
0<br />
0⎞<br />
⎟<br />
0⎟<br />
0⎟<br />
⎟<br />
1⎠<br />
⎛cos qi<br />
⎜<br />
⎜ sinqi<br />
=<br />
⎜ 0<br />
⎜<br />
⎝ 0<br />
− sinqi<br />
cos qi<br />
0<br />
0<br />
0<br />
0<br />
1<br />
0<br />
0⎞<br />
⎛ 1<br />
⎟ ⎜<br />
0⎟<br />
⎜0<br />
⎟<br />
•<br />
0 ⎜0<br />
⎟<br />
⎜<br />
1⎠<br />
⎝0<br />
0<br />
cos αi<br />
sinαi<br />
0<br />
0<br />
− sinαi<br />
cos αi<br />
0<br />
ai<br />
⎞<br />
⎟<br />
0 ⎟<br />
d ⎟<br />
i<br />
⎟<br />
1 ⎠<br />
⎛cos qi<br />
⎜<br />
⎜ sinqi<br />
=<br />
⎜<br />
0<br />
⎜<br />
⎝ 0<br />
− sinqi<br />
cos αi<br />
cos qi<br />
cos αi<br />
sinαi<br />
0<br />
sinqi<br />
sinαi<br />
− cos qi<br />
sinαi<br />
cos α<br />
i<br />
0<br />
ai<br />
cos qi<br />
⎞<br />
⎟<br />
ai<br />
sinqi<br />
⎟<br />
d<br />
⎟<br />
i ⎟<br />
1<br />
⎠<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 82<br />
Nur für Lehrzwecke







