

SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de
SCARA: Inverses Kinematisches Problem - BA-Produktionstechnik.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Beschreibung nach Denavit - Hartenberg<br />
Begründung:<br />
• Bisher wur<strong>de</strong>n die Koordinatensysteme intuitiv<br />
gewählt<br />
• Es ist aber zweckmäßig, nach einem einheitlichen<br />
Schema beziehungsweise Verfahren vorzugehen<br />
• Vorteil: Verschie<strong>de</strong>ne Anwen<strong>de</strong>r kommen zu einer<br />
gleichen o<strong>de</strong>r zumin<strong>de</strong>st vergleichbaren<br />
Beschreibung <strong>de</strong>r Aufgabe<br />
Prinzip:<br />
• Es geht darum, von einem i-ten<br />
Koordinatensystem zu einem (i+1)-ten<br />
Koordinatensystem zu kommen<br />
• Man beschränkt die Freiheitsgra<strong>de</strong> <strong>de</strong>r<br />
Koordinatensysteme:<br />
- eine Drehachse<br />
- eine Linearachse<br />
(oft prismatische Achse genannt)<br />
Denavit, J., Hartenberg, R. S.: A kinematic notation for lower pair mechanisms<br />
based on Matrices. Journal of Applied Mechanics, vol. 77, pp. 215–221, June 1955.<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
Bei einem Roboter<br />
bestehen im Normalfall<br />
folgen<strong>de</strong> Möglichkeiten für<br />
zwei so genannte<br />
kinematische Paare:<br />
Gelenk i<br />
Gelenk i<br />
Glied i<br />
Drehachse<br />
Drehachse<br />
Linearachse<br />
Linearachse<br />
Gelenk i+1<br />
Form und Masse<br />
<strong>de</strong>r Glie<strong>de</strong>r wer<strong>de</strong>n<br />
abstrahiert<br />
Gelenk i+1<br />
Drehachse<br />
Linearachse<br />
Drehachse<br />
Linearachse<br />
VLRob.ppt<br />
Folie 79<br />
Nur für Lehrzwecke<br />
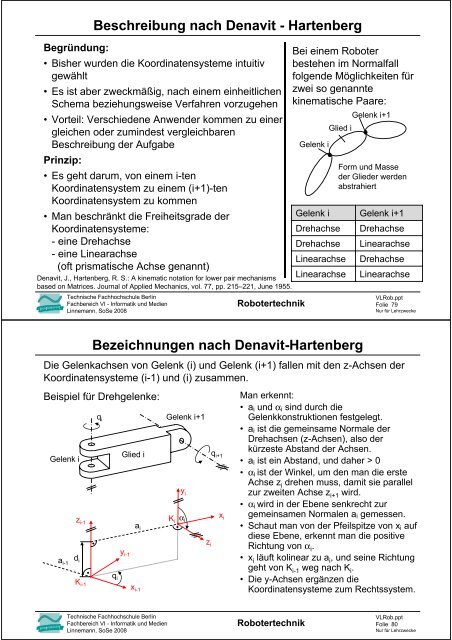
Bezeichnungen nach Denavit-Hartenberg<br />
Die Gelenkachsen von Gelenk (i) und Gelenk (i+1) fallen mit <strong>de</strong>n z-Achsen <strong>de</strong>r<br />
Koordinatensysteme (i-1) und (i) zusammen.<br />
Beispiel für Drehgelenke:<br />
Gelenk i<br />
q i Gelenk i+1<br />
q i+1<br />
Glied i<br />
z i-1<br />
K<br />
x i<br />
i<br />
α i<br />
a i<br />
z i<br />
y i-1<br />
a d<br />
i-1<br />
i<br />
q i<br />
K i-1<br />
x i-1<br />
y i<br />
Man erkennt:<br />
• a i und α i sind durch die<br />
Gelenkkonstruktionen festgelegt.<br />
• a i ist die gemeinsame Normale <strong>de</strong>r<br />
Drehachsen (z-Achsen), also <strong>de</strong>r<br />
kürzeste Abstand <strong>de</strong>r Achsen.<br />
• a i ist ein Abstand, und daher > 0<br />
• α i ist <strong>de</strong>r Winkel, um <strong>de</strong>n man die erste<br />
Achse z i drehen muss, damit sie parallel<br />
zur zweiten Achse z i+1 wird.<br />
• α i wird in <strong>de</strong>r Ebene senkrecht zur<br />
gemeinsamen Normalen a i gemessen.<br />
• Schaut man von <strong>de</strong>r Pfeilspitze von x i auf<br />
diese Ebene, erkennt man die positive<br />
Richtung von α i .<br />
• x i läuft kolinear zu a i , und seine Richtung<br />
geht von K i-1 weg nach K i .<br />
• Die y-Achsen ergänzen die<br />
Koordinatensysteme zum Rechtssystem.<br />
Technische Fachhochschule Berlin<br />
Fachbereich VI - Informatik und Medien<br />
Linnemann, SoSe 2008<br />
Robotertechnik<br />
VLRob.ppt<br />
Folie 80<br />
Nur für Lehrzwecke







