

PDF 7.831kB - Hochschule Ulm
PDF 7.831kB - Hochschule Ulm
PDF 7.831kB - Hochschule Ulm

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Fahrrades überwacht.<br />
Was das <strong>Ulm</strong>er Fahrrad-Radar leistet<br />
Der verwendete Sensor ermöglicht die<br />
Bestimmung von Relativgeschwindigkeiten<br />
und Winkelablagen von sich nähernden<br />
oder entfernenden Objekten.<br />
Winkelablagen von Objekten sind zur<br />
Spurerkennung essentiell. Mit ihrer<br />
Hilfe lässt sich unterscheiden, ob sich<br />
das nähernde Objekt auf der eigenen<br />
Fahrspur befindet oder nicht. Die Empfindlichkeit<br />
des Sensors reicht aus, um<br />
Autos in einer Entfernung bis 90 Meter<br />
zu erkennen.<br />
Auf dem Fahrrad wurde außerdem<br />
eine Webcam angebracht, um bei der<br />
Auswertung Radardaten mit dem realen<br />
Verkehrsgeschehen korrelieren zu<br />
können. Derartige Radarsensoren beruhen<br />
auf dem Dopplereffekt. Objekte<br />
mit einer Relativgeschwindigkeit zum<br />
eigenen Fahrrad, welche die elektromagnetische<br />
Welle des Radars reflektieren,<br />
führen zu einer Frequenzverschiebung<br />
zwischen abgestrahlter und<br />
empfangener bzw. reflektierter Welle.<br />
Diese Frequenzdifferenz erscheint am<br />
Ausgang des Radars und kann zur Detektion<br />
von Objekten und deren Relativgeschwindigkeit,<br />
ermittelbar über die<br />
Bestimmung der Frequenzdifferenz,<br />
herangezogen werden. Mathematisch<br />
muss das Ausgangssignal des Radars<br />
aus dem Zeitbereich in den Frequenzbereich<br />
transformiert werden. Diese<br />
Fouriertransformation zur Datenauswertung<br />
wurde bei unserem Fahrradradar<br />
mit MatLab implementiert.<br />
Erste Tests im realen Verkehr<br />
Was passiert, wenn beispielsweise ein<br />
Stadtbus zum Überholen ansetzt, haben<br />
wir bei einer Probefahrt mit der Webcam<br />
aufgezeichnet. Der Radarsensor<br />
liefert zwei Ausgangssignale: ein starkes<br />
positives Signal, das ein sich näherndes<br />
Objekt repräsentiert und in unserem<br />
Fall von dem Bus stammt, sowie ein<br />
kleines negatives Signal, das ein sich<br />
entfernendes Objekt repräsentiert und<br />
mit Reflexionen von der Straßenoberfläche<br />
zusammenhängt (Straßenclut-<br />
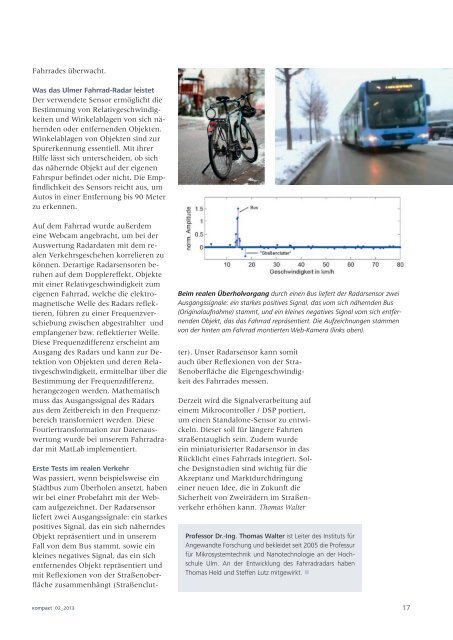
Beim realen Überholvorgang durch einen Bus liefert der Radarsensor zwei<br />
Ausgangssignale: ein starkes positives Signal, das vom sich nähernden Bus<br />
(Originalaufnahme) stammt, und ein kleines negatives Signal vom sich entfernenden<br />
Objekt, das das Fahrrad repräsentiert. Die Aufzeichnungen stammen<br />
von der hinten am Fahrrad montierten Web-Kamera (links oben).<br />
ter). Unser Radarsensor kann somit<br />
auch über Reflexionen von der Straßenoberfläche<br />
die Eigengeschwindigkeit<br />
des Fahrrades messen.<br />
Derzeit wird die Signalverarbeitung auf<br />
einem Mikrocontroller / DSP portiert,<br />
um einen Standalone-Sensor zu entwickeln.<br />
Dieser soll für längere Fahrten<br />
straßentauglich sein. Zudem wurde<br />
ein miniaturisierter Radarsensor in das<br />
Rücklicht eines Fahrrads integriert. Solche<br />
Designstudien sind wichtig für die<br />
Akzeptanz und Marktdurchdringung<br />
einer neuen Idee, die in Zukunft die<br />
Sicherheit von Zweirädern im Straßenverkehr<br />
erhöhen kann. Thomas Walter<br />
Professor Dr.-Ing. Thomas Walter ist Leiter des Instituts für<br />
Angewandte Forschung und bekleidet seit 2005 die Professur<br />
für Mikrosystemtechnik und Nanotechnologie an der <strong>Hochschule</strong><br />
<strong>Ulm</strong>. An der Entwicklung des Fahrradradars haben<br />
Thomas Held und Steffen Lutz mitgewirkt. •<br />
17













