

Leseprobe 1
Leseprobe 1
Leseprobe 1

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.1 Grundlagen mechanischen Verhaltens 77<br />
z<br />
D<br />
y<br />
A<br />
zz<br />
yz<br />
<br />
C<br />
xz<br />
x<br />
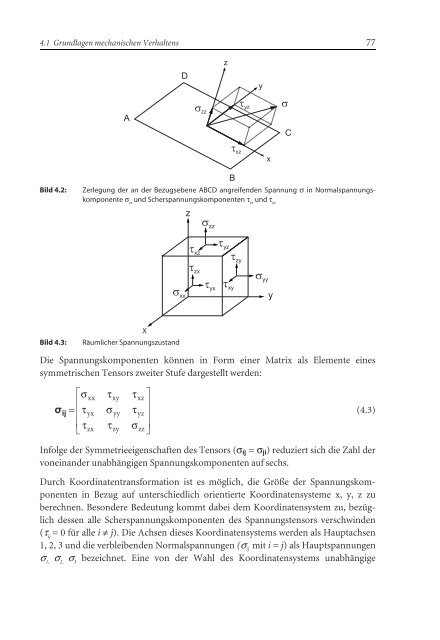
Bild 4.2:<br />
Zerlegung der an der Bezugsebene ABCD angreifenden Spannung σ in Normalspannungskomponente<br />
σ zz<br />
und Scherspannungskomponenten τ xz<br />
und τ yz<br />
z<br />
B<br />
xz<br />
yz<br />
zy<br />
zx<br />
yx<br />
xy<br />
xx<br />
zz<br />
yy<br />
y<br />
Bild 4.3:<br />
Räumlicher Spannungszustand<br />
x<br />
Die Spannungskomponenten können in Form einer Matrix als Elemente eines<br />
symmetrischen Tensors zweiter Stufe dargestellt werden:<br />
⎡σxx<br />
τxy<br />
τxz<br />
⎤<br />
⎢<br />
⎥<br />
σ ij = ⎢τyx<br />
σyy<br />
τyz<br />
⎥<br />
(4.3)<br />
⎢<br />
⎥<br />
⎣<br />
τzx<br />
τzy<br />
σzz<br />
⎦<br />
Infolge der Symmetrieeigenschaften des Tensors (σ ij = σ ji ) reduziert sich die Zahl der<br />
voneinander unabhängigen Spannungskomponenten auf sechs.<br />
Durch Koordinatentransformation ist es möglich, die Größe der Spannungskomponenten<br />
in Bezug auf unterschiedlich orientierte Koordinatensysteme x, y, z zu<br />
berechnen. Besondere Bedeutung kommt dabei dem Koordinatensystem zu, bezüglich<br />
dessen alle Scherspannungskomponenten des Spannungstensors verschwinden<br />
(τ ij<br />
= 0 für alle i ≠ j). Die Achsen dieses Koordinatensystems werden als Hauptachsen<br />
1, 2, 3 und die verbleibenden Normalspannungen (σ ij<br />
mit i = j) als Hauptspannungen<br />
σ 1,<br />
σ 2,<br />
σ 3<br />
bezeichnet. Eine von der Wahl des Koordinatensystems unabhängige









