Einführung in die Getriebelehre
Einführung in die Getriebelehre
Einführung in die Getriebelehre

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2.1 Grundbegriffe 15<br />
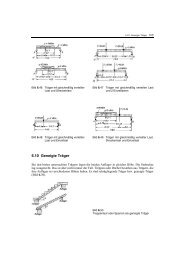
zuvor handelt es sich bei den Getrieben der Bilder 1.2, 1.3, 1.7 und 1.9 um Übertragungsgetriebe,<br />
bei den Getrieben der Bilder 1.4 bis 1.6, 1.8, 1.10 und 1.11 um Führungsgetriebe.<br />
2.1.1 Übertragungsgetriebe<br />
In Übertragungs- oder auch Funktionsgetrieben erfolgt <strong>die</strong> Bewegungsübertragung<br />
nach e<strong>in</strong>er Übertragungsfunktion (auch Getriebefunktion) und zwar ohne oder mit<br />
e<strong>in</strong>er Änderung der Bewegungsform (z.B. Drehen, Schieben, Schrauben). Die Bewegungs-<br />
oder Abtriebsfunktion q des Getriebes setzt sich aus der zeitabhängigen Antriebsfunktion<br />
p(t) und der Übertragungsfunktion q(p) zusammen: q(t) = q [p(t)], Tafel<br />
2.1.<br />
Entsprechend der Ableitungsstufe gibt es mehrere Übertragungsfunktionen (ÜF):<br />
[ () ]<br />
q= qpt<br />
→ ÜF 0. Ordnung ( ÜF 0)<br />
q( p)<br />
(2.1)<br />
Die Antriebsfunktion p(t) ist vorgegeben.<br />
E<strong>in</strong>maliges Differenzieren nach der Zeit t liefert <strong>die</strong> Abtriebsgeschw<strong>in</strong>digkeit:<br />
dq dq dp<br />
q&<br />
≡ = ⋅ = q′ ⋅ p&<br />
dt dp dt<br />
dq<br />
→ ÜF 1. Ordnung ( ÜF 1)<br />
q′<br />
≡<br />
(2.2)<br />
dp<br />
Entsprechend erhält man für <strong>die</strong> Abtriebsbeschleunigung:<br />
2<br />
d q 2<br />
&& q ≡ = q′′ ⋅ p& + q′ ⋅ && p<br />
2<br />
dt<br />
2<br />
d q<br />
→ ÜF 2. Ordnung ( ÜF 2)<br />
q′′<br />
≡<br />
(2.3)<br />
2<br />
dp<br />
Für <strong>die</strong> gleichmäßig übersetzenden G-Getriebe gilt:<br />
()<br />
q = K ⋅ p t , K = konst.<br />
(reziprokes Übersetzungsverhältnis)<br />
q q&<br />
q&&<br />
1<br />
→ = = = K = q′<br />
=<br />
(2.4)<br />
p p&<br />
&& p i