PDF (2 MB) - Nord
PDF (2 MB) - Nord
PDF (2 MB) - Nord

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
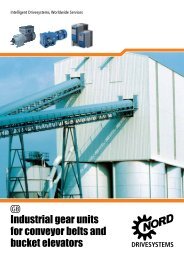
SERVO- Antriebstechnik<br />
5.8.4 Resolver<br />
5.8.4 Resolver<br />
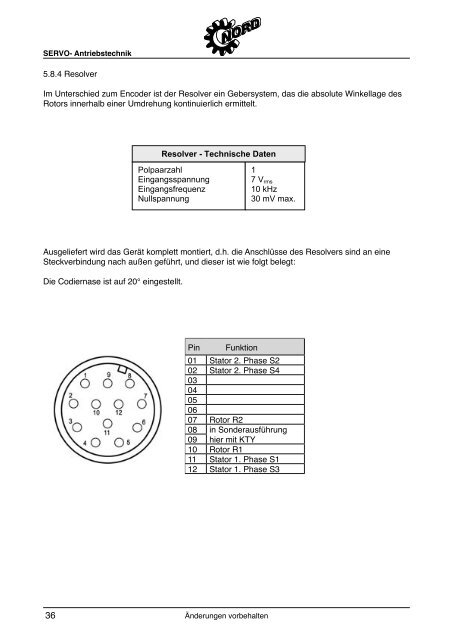
Im Unterschied zum Encoder ist der Resolver ein Gebersystem, das die absolute Winkellage des<br />
Rotors Im Unterschied innerhalb einer zum Encoder Umdrehung ist der kontinuierlich Resolver ein ermittelt. Gebersystem, das die absolute Winkellage des<br />
Rotors innerhalb einer Umdrehung kontinuierlich ermittelt.<br />
Ausgeliefert wird wird das das Gerät Gerät komplett montiert, d.h. d.h. die die Anschlüsse des des Resolvers sind sind an an eine eine<br />
Steckverbindung nach nach außen geführt, und und dieser ist ist wie wie folgt folgt belegt:<br />
Die ( Darstellung Codiernase um ist 20° auf versetzt 20° eingestellt. )<br />
36<br />
2<br />
3<br />
1<br />
4<br />
9<br />
10 12<br />
11<br />
8<br />
5<br />
Resolver - Technische Daten<br />
Polpaarzahl<br />
Eingangsspannung<br />
Eingangsfrequenz<br />
Nullspannung<br />
7<br />
6<br />
Pin Funktion<br />
1<br />
7 Vrms<br />
10 kHz<br />
30 mV max.<br />
01 Stator 2. Phase S2<br />
Pin<br />
02 Stator<br />
Funktion<br />
2. Phase S4<br />
03<br />
01 04Stator<br />
2. Phase S2<br />
02 05Stator<br />
2. Phase S4<br />
03 06<br />
04 07 Rotor R2<br />
05 08<br />
06 09<br />
07 10Rotor<br />
Rotor R2 R1<br />
08 11in<br />
Sonderausführung<br />
Stator 1. Phase S1<br />
09 12hier<br />
Stator mit KTY 1. Phase S3<br />
10 Rotor R1<br />
11 Stator 1. Phase S1<br />
12 Stator 1. Phase S3<br />
Servo- Antriebstechnik<br />
Änderungen vorbehalten<br />
Änderungen vorbehalten 43