3. Finite-Elemente-Methode (FEM)
3. Finite-Elemente-Methode (FEM)
3. Finite-Elemente-Methode (FEM)

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Beim��Ð�Ö��Ò- bzw.Ê�ØÞ-Verfahren ist ein Ansatz für das gesamte Gebiet zu machen,<br />
was bei komplexen Berandungen und Randbedingungen (��Ð�Ö��Ò: Ansatz erfüllt alle<br />
Randbedingungen,Ê�ØÞ: Ansatz erfüllt kinematische Randbedingungen) sehr kompliziert<br />
werden kann. Abhilfe schafft ein bereichsweise definierter Ansatz, was uns auf die <strong>Methode</strong><br />
der finiten <strong>Elemente</strong> führt (�ÓÙÖ�ÒØ1888-1972).<br />
<strong>3.</strong>1. Schwache Form und Variationsformulierung<br />
Man kann verschiedene Zugänge zur <strong>Methode</strong> der <strong>Finite</strong>n <strong>Elemente</strong> finden. Wir betrachten<br />
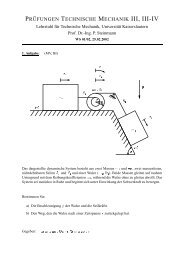
zunächst das einfache eindimensionale Beispiel eines einseitig eingespannten Stabes aus Abbildung<br />
<strong>3.</strong>1.<br />
Differentialgleichung :<br />
x<br />
p(x) F<br />
l<br />
EA<br />
Abbildung <strong>3.</strong>1.: Einseitig eingespannter Balken<br />
N ′ +p = 0 GGW<br />
N = EAε Stoffgesetz<br />
ε = u ′ Kinematik<br />
⎫<br />
⎬<br />
⎭ (EAu′ ) ′ +p = 0<br />
Eine Lösung erhält man durch Integration des letzten Ausdrucks und Einsetzen der Randbedingungen:<br />
u(0) = 0 kinematische Randbedingung<br />
N(l) = EAu ′ (l) = F dynamische Randbedingung<br />
15
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
<strong>3.</strong>1.1. Schwache Form / Prinzip der virtuellen Verrückungen<br />
Umeinen Ansatzzufinden,fordernwir, dassdasIntegralder Funktion N ′ +pmultipliziertmit<br />
einer Testfunktion verschwinden soll. Partielle Integration und Einsetzen von Materialgesetz<br />
und Kinematik liefert<br />
� l<br />
0 = (N ′ +p)ηdx<br />
=<br />
=<br />
0<br />
� l<br />
0<br />
� l<br />
0<br />
(−Nη ′ +pη)dx+Nη | l<br />
0<br />
EAu ′ η ′ dx−<br />
� l<br />
0<br />
pηdx+Nη | l<br />
0 .<br />
Die letzte Gleichung ist äquivalent zum Prinzip der virtuellen Verrückungen, denn setzt man<br />
η = δu, so erhält man<br />
� l<br />
EAu<br />
0<br />
′ δu ′ � l<br />
dx−<br />
pδudx− Nδu|<br />
0 � �� �<br />
l<br />
0 = 0, (<strong>3.</strong>1)<br />
� �� �<br />
δW i<br />
−δW a<br />
das heißt δW i = δW a . In Worten: Bei einer virtuellen Verrückung aus der Gleichgewichtslage<br />
ist die Arbeit der inneren Kräfte gleich der Arbeit der äußeren Kräfte.<br />
Betrachte nun den Term − Nδu| l<br />
0 für unser konkretes Beispiel<br />
�<br />
x = 0 : u(0) = 0 ❀ δu = 0<br />
− Nδu|<br />
x = l : N = F<br />
l<br />
0 = −Fδu(l).<br />
Schwache Form: geringe Differenzierbarkeitsanforderungen an den Ansatz für u.<br />
<strong>3.</strong>1.2. Variationsprinzip<br />
Die Gleichung (<strong>3.</strong>1) lässt sich auch aus dem Potential des Stabes ableiten. Hier berechnen<br />
wir einen Minimalwert für das Potential in Abhängigkeit der Verrückung u(x). Dies führt zur<br />
Variationsrechnung<br />
� l<br />
1<br />
Π[u] =<br />
0 2 EAu′2 � l<br />
dx−<br />
pudx− Nu|<br />
0 � �� �<br />
l<br />
0 → min<br />
� �� �<br />
δΠ[u] =<br />
Anmerkung:<br />
16<br />
� l<br />
0<br />
Π i<br />
EAu ′ δu ′ dx−<br />
� l<br />
0<br />
Π a<br />
pδudx− Nδu| l<br />
0 = 0. (<strong>3.</strong>2)<br />
• identisches Resultat wie vorher, aber nicht immer existiert Π (Plastizität)<br />
• vgl. Ritz-Verfahren
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher<br />
Differentialgleichungen<br />
<strong>3.</strong>2.1. Stabelement<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
Als Ausgangspunkt wählen wir Gleichung (<strong>3.</strong>1), bzw. (<strong>3.</strong>2) und betrachten dabei Systeme<br />
ohne Randlasten (Abbildung <strong>3.</strong>2), d.h.<br />
� l<br />
δΠ[u] = EAu ′ δu ′ � l<br />
dx− pδudx = 0.<br />
0<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
x<br />
0<br />
p(x)<br />
l<br />
Abbildung <strong>3.</strong>2.: Einseitig eingespannter Balken ohne Randlast<br />
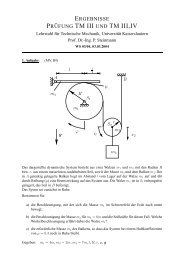
Wir erstellen einen bereichsweisen Ansatz für u und verwenden dabei die Formfunktionen NI<br />
(Abbildung <strong>3.</strong>3). Wir erhalten für die Verschiebung<br />
u h (x) =<br />
N�<br />
NI(x)uI. (<strong>3.</strong>3)<br />
I=1<br />
Die in Abbildung <strong>3.</strong>3 dargestellten Formfunktionen NI sind durch<br />
⎧<br />
⎨ 1−<br />
NI(x) =<br />
⎩<br />
xI−x<br />
für xI−1 < x < xI<br />
hI−1<br />
1+ xI−x<br />
für xI < x < xI+1<br />
hI<br />
0 sonst.<br />
(<strong>3.</strong>4)<br />
mit hI = xI+1 −xI und hI−1 = xI −xI−1 gegeben. Mit den Gleichungen (<strong>3.</strong>3) und (<strong>3.</strong>4)<br />
ergibt sich eine Formel für die Ableitung der Verschiebung<br />
mit<br />
(u h (x)) ′ =<br />
N�<br />
I=1<br />
BI(x) = N ′ I (x) =<br />
N ′ I (x)uI =<br />
⎧<br />
⎨<br />
N�<br />
BI(x)uI, (<strong>3.</strong>5)<br />
I=1<br />
1 für xI−1 < x < xI<br />
hI−1<br />
−1<br />
für xI < x < xI+1<br />
hI ⎩<br />
0 sonst<br />
17
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
ũ<br />
NI<br />
1<br />
u1 u2 u3 u4 u5<br />
x1 x2 x3 x4 x5<br />
N3<br />
N4<br />
x1 x2 x3 x4 x5<br />
h1<br />
h2<br />
h3<br />
Abbildung <strong>3.</strong><strong>3.</strong>: Bereichsweise linearer Ansatz<br />
Für die virtuellen Verrückungen (Testfunktionen) wird ein analoger Ansatz gewählt (vgl.<br />
��Ð�Ö��ÒVerfahren), d.h.<br />
und<br />
δu h (x) =<br />
(δu h (x)) ′ =<br />
N�<br />
NJ(x)δuJ<br />
J=1<br />
h4<br />
x<br />
x<br />
(<strong>3.</strong>6)<br />
N�<br />
BJ(x)δuJ. (<strong>3.</strong>7)<br />
J=1<br />
Einsetzen dieser Ansätze in die schwache Form (<strong>3.</strong>1), bzw. in die erste Variation (<strong>3.</strong>2) liefert<br />
δW[u h � �<br />
l N�<br />
� �<br />
N�<br />
� � �<br />
l N�<br />
�<br />
] = BIδuI EA BJuJ dx− NIδuI pdx = 0 .<br />
0<br />
I=1<br />
J=1<br />
Da die virtuellen Verschiebungen δuI von x unabhängig sind, können sie aus der Intergration<br />
herausgezogen werden. Damit erhält man die Gleichung<br />
N�<br />
�� l N�<br />
� �<br />
l<br />
δuI BIEA BJuJ dx− NIpdx = 0 , (<strong>3.</strong>8)<br />
I=1<br />
0<br />
J=1<br />
0<br />
die für beliebige δuI gelten muss. Das bedeutet, dass die Klammer (...) verschwinden muss.<br />
Es entstehen N Gleichungen für die N unbekannten Verschiebungen uJ. Da auch diese von<br />
18<br />
0<br />
I=1
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
x unabhängig sind, lassen sie sich ebenfalls aus dem Integral ziehen, wodurch<br />
N�<br />
� l � l<br />
BIEABJ dxuJ = NIpdx (<strong>3.</strong>9)<br />
J=1<br />
0<br />
0<br />
entsteht. Mit den Abkürkungen KIJ = � BIEABJ dx und FI = � NIpdx lässt sich (<strong>3.</strong>9)<br />
kürzer schreiben als<br />
N�<br />
J=1<br />
KIJuJ = FI<br />
(<strong>3.</strong>10)<br />
bzw. Ku = F. (<strong>3.</strong>11)<br />
Beispiel:<br />
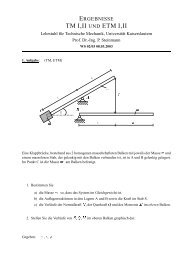
Betrachten wir noch einmal den einseitig eingespannten Balken ohneRandlastmitp(x) = p0.<br />
u1<br />
x<br />
h1<br />
p0<br />
l<br />
u2<br />
EA<br />
Abbildung <strong>3.</strong>4.: Diskretisierung Balken ohne Randlast<br />
Wählt man für die Ansatzfunktionen lineare Ansätze (Abbildung <strong>3.</strong>5), so ergeben sich die<br />
Gleichungen<br />
u h = N1u1 +N2u2 +N3u3<br />
� u h � ′ =<br />
� − 1<br />
h1 u1 + 1<br />
h1 u2, 0 ≤ x ≤ h1<br />
− 1<br />
h2 u2 + 1<br />
h2 u3, h1 ≤ x ≤ h1 +h2<br />
h2<br />
u3<br />
19
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
u1 u2 u3<br />
h1<br />
N1<br />
N2<br />
h2<br />
N3<br />
− 1<br />
h1<br />
1<br />
h1<br />
−<br />
1<br />
h2<br />
1<br />
h2<br />
N ′ 3<br />
N ′ 1<br />
N ′ 2<br />
Abbildung <strong>3.</strong>5.: Beispiel eines linearen Ansatzes<br />
Nun können wir die Komponenten der Steifigkeitsmatrix KIJ und die der rechten Seite FI<br />
gemäß (<strong>3.</strong>10) berechnen und wir erhalten für (<strong>3.</strong>11) das System<br />
⎡<br />
⎢<br />
EA⎢<br />
⎣<br />
1<br />
h1<br />
− 1<br />
h1<br />
− 1<br />
h1<br />
1 1<br />
+ h1 h2<br />
0 − 1<br />
h2<br />
0<br />
− 1<br />
h2<br />
1<br />
h2<br />
⎤⎡<br />
⎥⎢<br />
⎥⎢<br />
⎦⎣<br />
u1<br />
u2<br />
u3<br />
⎤<br />
⎥<br />
⎦<br />
= p0<br />
Alle Einträge, die h1 enthalten, kommen vom Stab zwischen den Knoten 1 und 2. Die Einträge,<br />
die h2 enthalten, erhalten wir durch den Stab zwischen den Knoten 2 und <strong>3.</strong> Hier erkennt<br />
man gut den elementweisen Aufbau des Gleichungssystems und daher macht auch der Name<br />
” <strong>Finite</strong> <strong>Elemente</strong> <strong>Methode</strong>“ durchaus Sinn.<br />
Das Gleichungssystem ist singulär. Um die Verschiebungen wirklich ausrechnen zu können,<br />
müssen die Randbedingungen u1 = 0 und damit δu1 = 0 eingearbeitet werden. Aus u1 = 0<br />
folgt direkt, dass die erste Spalte der Matrix gestrichen werden kann. Die zweite Randbedingung<br />
δu1 führt zum Streichen der ersten Zeile, s. Gleichung (<strong>3.</strong>8). Dadurch erhalten wir das<br />
lineare Gleichungssystem<br />
EA<br />
� 1<br />
h1<br />
+ 1<br />
h2<br />
1<br />
h2<br />
− 1<br />
h2<br />
1<br />
h2<br />
�� u2<br />
u3<br />
�<br />
= p0<br />
� � h1<br />
2<br />
⎡<br />
⎢<br />
⎣<br />
� h1<br />
2<br />
�<br />
h2 + 2<br />
h1<br />
2<br />
+ h2<br />
2<br />
<strong>3.</strong>2.1.1. Elementsteifigkeitsmatrix und Elementlastfaktor<br />
Betrachtet wird nun ein ” Element“ zwischen zwei Knoten. Mit e bezeichnen wir im Folgenden<br />
die Elementnummer. Hat eine der Größen den Index e, so bezieht sich diese Größe auf das<br />
Element mit der Nummer e.<br />
Betrachten wir zunächst einen linearen Ansatz für die Formfunktion, wie er in Abbildung <strong>3.</strong>6<br />
20<br />
h2<br />
2<br />
h2<br />
2<br />
�<br />
.<br />
�<br />
⎤<br />
⎥<br />
⎦ .
N e 1<br />
N e 2<br />
u e 1<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
xe<br />
he<br />
u e 2<br />
xe<br />
xe<br />
e : Elementnummer<br />
N e 1 (xe) = 1− xe<br />
N e 2(xe) = xe<br />
Abbildung <strong>3.</strong>6.: Allgemeines 2-Knoten-Stabelement<br />
dargestellt ist. Wir erhalten für die Verschiebungen im Stab<br />
2�<br />
�<br />
ue =<br />
= N e u e = (u e ) T (N e ) T ,<br />
(ue) ′ =<br />
I=1<br />
2�<br />
I=1<br />
N e I(xe)u e I = � N e 1 N e 2<br />
B e I (xe)u e I = � − 1<br />
he<br />
1<br />
he<br />
� � u e 1<br />
u e 2<br />
� � u e 1<br />
u e 2<br />
he<br />
he<br />
�<br />
= B e u e = (u e ) T (B e ) T .<br />
Zur Berechnung der Elementsteifigkeitsmatrix und des Elementlastvektors wird das diskrete<br />
Gesamtpotential betrachtet. Es gilt:<br />
Π h Ne �<br />
(u) =<br />
e=1<br />
Π e (u e ) ,<br />
wobei das Potential eines Elements gegeben ist durch<br />
Π e (u e ) = 1<br />
� he<br />
(ue)<br />
2 0<br />
′ EAe(ue) ′ �<br />
dxe − uepedxe<br />
= 1<br />
2 (ue ) T<br />
� he<br />
(B e ) T EAeB e dxeu e −(u e ) T<br />
� he<br />
0<br />
0<br />
(N e ) T pedxe<br />
Damit gilt für die 1. Variation des Elementpotentials, d.h. für die schwache Form auf <strong>Elemente</strong>bene:<br />
⎡<br />
⎤<br />
δΠ e = (δu e ) T<br />
⎢�<br />
he<br />
⎢ (B<br />
⎣ 0<br />
e ) T EAeB e dxe u<br />
� �� �<br />
e � he<br />
− (N<br />
0<br />
e ) T ⎥<br />
pedxe⎥<br />
= 0.<br />
⎦<br />
� �� �<br />
K e<br />
F e<br />
21
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Damit lassen sich für EAe = EA = const und pe = p0 = const die Elementsteifigkeitsmatrix<br />
K e und der Elementlastvektor F e berechnen. Wir erhalten<br />
K e � � � �<br />
1 − � �<br />
he 1 1 EA 1 −1<br />
= EAhe 1 − = (<strong>3.</strong>12)<br />
he he<br />
he −1 1<br />
he<br />
F e � � � he xe 1−<br />
= p0 dxe = p0he<br />
� �<br />
1<br />
(<strong>3.</strong>13)<br />
2 1<br />
Anmerkungen<br />
0<br />
he<br />
xe<br />
he<br />
• Die Elementsteifigkeitsmatrix ist symmetrisch.<br />
• Der Rang von K e ist 1, d.h. die Matrix ist nicht invertierbar. Den Nulleigenwerten<br />
entsprechen die Starrkörperbewegungen.<br />
• Die Zeilensumme und die Spaltensumme ergeben jeweils Null.<br />
• Die resultierende Kraft ergibt sich durch F e 1 +Fe 2<br />
= p0he.<br />
Zur Bestimmung des Gesamtpotentials, also zum Zusammenbau des Gesamtsystems aus<br />
den <strong>Elemente</strong>n, müssen die Übergangsbedingungen (Kompatibilitäten) berücksichtigt werden.<br />
Betrachte hierzu zwei <strong>Elemente</strong> mit den Elementnummern e−1 und e (Abbildung <strong>3.</strong>7).<br />
u e−1<br />
1<br />
(e−1)<br />
u e−1<br />
2<br />
u e 1<br />
(e)<br />
Abbildung <strong>3.</strong>7.: Zwei zu assemblierende <strong>Elemente</strong><br />
Der rechte Knoten des <strong>Elemente</strong>s e − 1 und der linke Knoten des <strong>Elemente</strong>s e sollen die<br />
gleichen Verschiebungen erfahren, also<br />
u e−1<br />
2 = u e 1. (<strong>3.</strong>14)<br />
Da in einem FE-Programm Knoten globale Knotennummern haben, geschieht der Zusammenbau<br />
von lokalen und globalen Verschiebungen nach dem Schema, das in Abbildung <strong>3.</strong>8<br />
skizziert ist.<br />
Das heißt<br />
22<br />
u e = A e u (<strong>3.</strong>15)<br />
Bsp: e = 5 :<br />
�<br />
u (5)<br />
1<br />
u (5)<br />
2<br />
�<br />
=<br />
� 0 0 0 0 1 0 0<br />
0 0 0 0 0 1 0<br />
⎡<br />
� ⎢<br />
⎣<br />
u1<br />
u2<br />
.<br />
u7<br />
⎤<br />
⎥<br />
⎦<br />
u e 2
1 2 3 4 5 6 7<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
(1) (2) (3) (4) (5) (6)<br />
globale Knotennummer<br />
(Elementnummer e)<br />
1 (5) 2 lokale Knotennummer<br />
Abbildung <strong>3.</strong>8.: Zusammenhang zwischen globalen und lokalen Knotennummern<br />
A e ist eine sogenannte Boolesche Matrix. Damit lässt sich der Zusammenbau/Assemblierung<br />
wie folgt realisieren:<br />
Π h (u) =<br />
Ne �<br />
e=1<br />
= 1<br />
2 uT<br />
Π e =<br />
Ne �<br />
e=1<br />
Ne � 1<br />
2 (ue ) T K e u e −<br />
e=1<br />
Π h (u) = 1<br />
2 uT Ku−u T F → min<br />
Für die 1. Variation gilt damit<br />
Ne �<br />
e=1<br />
(u e ) T F e<br />
(Ae ) T K e A e u−u T<br />
Ne �<br />
(Ae ) T F e<br />
δΠ h (u) = δu T [Ku−F] = 0, ∀ δu<br />
e=1<br />
❀ Ku = F, (<strong>3.</strong>16)<br />
wobei die globale Steifigkeitsmatrix K wieder eine symmetrische Matrix ist. Sie und der<br />
globale Lastvektor F sind durch die Formeln<br />
K =<br />
F =<br />
Ne �<br />
e=1<br />
Ne �<br />
e=1<br />
(A e ) T K e A e<br />
(A e ) T F e<br />
(<strong>3.</strong>17)<br />
(<strong>3.</strong>18)<br />
gegeben. Eine Berechnung der Matrizen K und F nach (<strong>3.</strong>17) und (<strong>3.</strong>18) ist numerisch<br />
sehr ineffizient, da die Boolesche Matrix A e viele 0-Einträge enthält. Daher wird bei der<br />
Implementierung anders vorgegangen. Es wird mit einem Koinzidenzschema (Zeigerfeld gearbeitet).<br />
Zum obigen Beispiel (Abbildung <strong>3.</strong>8) wird z.B. folgendes Schema gespeichert.<br />
Element 1 2 3 4 5 6<br />
lokaler Knoten 1 2 1 2 1 2 1 2 1 2 1 2<br />
globaler Knoten 1 2 2 3 3 4 4 5 5 6 6 7<br />
Tabelle <strong>3.</strong>1.: Koinzidenzschema/Topologiefeld<br />
23
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
P3<br />
1 2 3 4 5 6<br />
Abbildung <strong>3.</strong>9.: Beispiel eines durch Einzelkräften belasteten Stabes<br />
Als einfaches Beispiel betrachten wir eine Reihe von Ne Stäben mit he = const und EAe =<br />
EA = const und erhalten die globale Steifigkeitsmatrix<br />
K = EA<br />
⎡<br />
⎤<br />
1 −1<br />
⎢ −1 1+1 −1 ⎥<br />
⎢ −1 1+1 −1 ⎥<br />
⎢<br />
h ⎢<br />
.. .. ..<br />
⎥ .<br />
. . . ⎥<br />
⎢<br />
⎥<br />
⎣ −1 1+1 −1 ⎦<br />
−1 1<br />
Greifen an einem Stabsystem zusätzlich Einzelkräfte Pi an, so werden diese auf der rechten<br />
Seite des Gleichungssystems (<strong>3.</strong>16) berücksichtigt. Belasten wir einen Stab zum Beispiel an<br />
den Knoten 3 und 6 (siehe Abbildung <strong>3.</strong>9), so ergibt sich das Gleichungssystem<br />
⎡<br />
⎢<br />
Ku = F = ⎢<br />
⎣<br />
0<br />
0<br />
−P3<br />
0<br />
0<br />
P6<br />
⎤<br />
⎥<br />
⎥.<br />
⎥<br />
⎦<br />
Das stimmt mit der Formel aus dem Prinzip der virtuellen Verrückungen überein, in der die<br />
Kräfte in folgender Weise berücksichtigt werden:<br />
� l<br />
δΠ = EAu ′ δu ′ � l<br />
dx− pδudx−(−P3)δu3 −P6δu6 = 0 .<br />
0<br />
0<br />
Die <strong>Finite</strong> Elemtente <strong>Methode</strong> liefert als Ergebnis das Verschiebungsfeld u. In vielen technischen<br />
Fragestellungen sind aber nicht die Verschiebungen von Interesse, sondern z.B. die<br />
Spannungen. Diese lassen sich aus der Lösung von (<strong>3.</strong>16) in einer Nachlaufrechnung bestimmen.<br />
Dieser Prozess wird ” Postprocessing“ genannt. Die Spannung werden dabei aus der<br />
Dehnung und damit aus der Ableitung der Verschiebung berechnet. Es gelten:<br />
σ = Eε = Eu ′ ,<br />
u e = N e u e , bzw. εe = B e u e .<br />
Damit ergeben sich die Spannungen in einem Element zu<br />
σe = EB e u e = EB e A e �<br />
u = E − 1 1<br />
he he<br />
24<br />
= E ue 2 −u e 1<br />
he<br />
�� u e 1<br />
u e 2<br />
. (<strong>3.</strong>19)<br />
�<br />
P6
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
u e 1<br />
(e)<br />
he<br />
Abbildung <strong>3.</strong>10.: Knotenverschiebungen auf <strong>Elemente</strong>bene<br />
Anmerkung<br />
Wir werden aus (<strong>3.</strong>19) immer eine konstante Spannung im Element σe = const erhalten. Für<br />
p(x) �= 0 kann das nur eine Näherung darstellen.<br />
Bei konstanter Spannung ist die Normalkraft im Element ebenfalls konstant und es besteht<br />
der Zusammenhang<br />
u<br />
Ne = σeAe = EAe<br />
e 2 −ue1 .<br />
he<br />
Bis hierhin haben wir nur Stäbe betrachtet, deren Lage mit der Koordinatenrichtung zusammenfällt.<br />
Für Fachwerke dagegen ist die Einbeziehung von gedrehten Stäben, d.h. die<br />
Beschreibung von Stäben in beliebiger Lage notwendig. Betrachte dazu einen um den Winkel<br />
α gedrehten Stab, wie er in Abbildung <strong>3.</strong>11 dargestellt ist.<br />
y<br />
x<br />
u e 1<br />
u e 1,x<br />
1<br />
¯x<br />
u e 1,y<br />
Wir erkennen die Beziehungen<br />
he, EA<br />
α<br />
2<br />
u e 2<br />
u e 2<br />
u e 2,x<br />
u e 2,y<br />
Abbildung <strong>3.</strong>11.: Stab in allgemeiner Lage<br />
u e 2<br />
α<br />
u2,x<br />
u e 1,x = ue 1 cosα ue 2,x = ue 2 cosα<br />
u e 1,y = ue 1 sinα ue 2,y = ue 2 sinα<br />
u e 1 = ue 1,x cosα+ue 1,y sinα ue 2 = ue 2,x cosα+ue 2,y sinα<br />
·<br />
u2,y<br />
α<br />
25
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Damit lässt sich nun ein Zusammenhang zwischen lokalen Freiheitsgraden (ue 1 ,ue2 ) und globalen/kartesischen<br />
Freiheitsgraden (ue 1x,ue 1y,ue 2x,ue 2y) beschreiben<br />
u e =<br />
� u e 1<br />
u e 2<br />
� � �<br />
cosα sinα 0 0<br />
=<br />
0 0 cosα sinα<br />
� �� �<br />
R e<br />
⎡<br />
u<br />
⎢<br />
⎣<br />
e 1,x<br />
ue 1,y<br />
ue 2,x<br />
ue ⎤<br />
⎥<br />
⎦<br />
2,y<br />
� �� �<br />
u<br />
(<strong>3.</strong>20)<br />
Bezeichnet man die Transformationsmatrix mit R e und den Vektor der Verschiebungen mit<br />
u, dann lässt sich (<strong>3.</strong>20) kurz schreiben als<br />
u e = R e u und<br />
δu e = R e δu.<br />
Für den obigen Stab aus Abbildung <strong>3.</strong>11 lassen sich damit die Elementsteifigkeitsmatrix ˆK e<br />
und der Elementlastvektor ˆ F e<br />
bezüglich des globalen Koordinatensystems berechnen aus<br />
δΠe = δu T<br />
�<br />
ReT � he<br />
B<br />
0<br />
T EAeB d¯xR e<br />
� �� �<br />
ˆK e<br />
u−R eT<br />
� he<br />
N<br />
0<br />
T ped¯x<br />
� �� �<br />
ˆF e<br />
�<br />
= 0<br />
ˆK e<br />
= R eT K e R e (<strong>3.</strong>21)<br />
ˆF e = R eT F e<br />
(<strong>3.</strong>22)<br />
Für EAe = EA = const, p = p0 = const und he = h gilt damit<br />
ˆK e<br />
= EA<br />
⎡<br />
c<br />
⎢<br />
h ⎣<br />
2 cs −c2 −cs<br />
cs s2 −cs −s2 −c2 −cs c2 cs<br />
−cs −s2 cs s2 ⎤<br />
⎥<br />
⎦<br />
ˆF e<br />
= p0h<br />
⎡ ⎤<br />
c<br />
⎢ s ⎥<br />
2 ⎣ c ⎦<br />
s<br />
,<br />
wobei die Abkürzungen c = cosα und s = sinα verwendet wurden.<br />
<strong>3.</strong>2.2. Balkenelemente<br />
Zunächst sollen einige Grundlagen der Balkentheorie zusammengestellt werden. Es wird ein<br />
eindimensionaler Spannungszustand vorausgesetzt und bezüglich der Kinematik wird angenommen,<br />
dass deformierte Querschnitte eben bleiben. Eine Längsdeformation der Balkenmittellinie<br />
wird zunächst vernachlässigt. Ein deformierter Balken und die verwendeten Größen<br />
sind in Abbildung <strong>3.</strong>12 skizziert. Außerdem verwenden wir die Notation (·) ′ = ∂(·)<br />
∂x .<br />
Mit den Größen w und β lässt sich die Schubverzerrung γxz = γ berechnet (Abbildung <strong>3.</strong>13).<br />
26
Es gelten die kinematischen Beziehungen<br />
z<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
w<br />
P ′<br />
P<br />
β<br />
Abbildung <strong>3.</strong>12.: Deformierter Balken<br />
β<br />
z<br />
w ′<br />
Abbildung <strong>3.</strong>1<strong>3.</strong>: Schubverzerrung<br />
w = w(x) (<strong>3.</strong>23)<br />
u(x,z) = −zβ(x) (<strong>3.</strong>24)<br />
γxz = γ = ∂w<br />
∂x<br />
x<br />
+ ∂u<br />
∂z = w′ −β (<strong>3.</strong>25)<br />
ε = ∂u<br />
∂x = −zβ′ . (<strong>3.</strong>26)<br />
Für die Kraftgrößen Querkraft Q und Biegemoment M gelten mit σ = Eε und τ = Gγ die<br />
linearen Beziehungen<br />
�<br />
Q = τ dA = GĀγ, (<strong>3.</strong>27)<br />
�<br />
M =<br />
zσdA = −Eβ ′<br />
�<br />
z 2 dA = −EIβ ′<br />
wobei Ā die Ersatzfläche für Schub darstellt, da τ nicht konstant über A ist.<br />
x<br />
(<strong>3.</strong>28)<br />
27
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Hinzu kommen die Gleichgewichtsbeziehungen zwischen den Kraftgrößen. Es gilt (siehe Abbildung<br />
<strong>3.</strong>14 und vgl. TM 1)<br />
M ′ −Q = 0 (<strong>3.</strong>29)<br />
Q ′ +q = 0. (<strong>3.</strong>30)<br />
Daraus folgt direkt, dass M ′′ +q = 0.<br />
q<br />
Q Q+dQ<br />
M M +dM<br />
dx<br />
Abbildung <strong>3.</strong>14.: Gleichgewicht am deformierten Balken<br />
<strong>3.</strong>2.2.1.�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken<br />
Beim�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken wird<br />
d.h.<br />
davon ausgegangen, dass der Balken schubstarr ist,<br />
γ = w ′ −β = 0 ❀ w ′ = β (<strong>3.</strong>31)<br />
Dadurch geht in (<strong>3.</strong>27) das Stoffgesetz verloren und die Querkraft ist nur durch die Gleichgewichtsbeziehung<br />
(<strong>3.</strong>29)bestimmt.Verwendet man(<strong>3.</strong>31),soergibtsichfürdasBiegemoment<br />
aus (<strong>3.</strong>25) und (<strong>3.</strong>28) die Gleichung<br />
M = −EIw ′′<br />
(<strong>3.</strong>32)<br />
MitderBedingungM ′′ +q = 0folgtsomitdieVerschiebungsdifferentialgleichungdes�ÙÐ�Ö<br />
��ÖÒÓÙÐÐ�-Balkens (EIw ′′ ) ′′ −q = 0. (<strong>3.</strong>33)<br />
Nun können wir auch das Potential für einen�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken aufstellen. Für<br />
verschwindende Randlasten gilt<br />
Π[w] = 1<br />
� l<br />
EIw<br />
2 0<br />
′′2 � l<br />
dx− qwdx → min (<strong>3.</strong>34)<br />
0<br />
und die erste Variation bzw. Schwache Form lautet<br />
� l<br />
δΠ[w] = EIw ′′ δw ′′ � l<br />
dx− qδwdx = 0. (<strong>3.</strong>35)<br />
28<br />
0<br />
0
2<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
x<br />
1 3<br />
l/2 l/2<br />
ξ = −1 ξ = 0 ξ = 1<br />
Abbildung <strong>3.</strong>15.: Freiheitsgrade am�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken<br />
Alswesentlichebzw.geometrischeRandbedingungengeltenbeim�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken<br />
die Absenkung w und die Neigung w ′ . Dies hat zur Konsequenz, dass die elementweisen Ansätze<br />
stetig in w und w ′ sein müssen (C 1 -Stetigkeit). Dies ist eine höhere Stetigkeitsanforderung<br />
als beim Stabelement, bei dem nur stetige Funktionswerte (C 0 -Stetigkeit) gefordert<br />
werden. Daraus ergibt sich ein einfaches Balkenelement mit jeweils zwei Freiheitsgraden (Absenkung<br />
und Neigung) an zwei Knoten, siehe Abbildung <strong>3.</strong>15.<br />
Als Ansätze für die Absenkung w im Element wird eine Interpolation mit Formfunktionen<br />
aus einem kubischen Polynom gewählt:<br />
NI(ξ) = a 0 I +a1 I ξ +a2 I ξ2 +a 3 I ξ3<br />
ξ<br />
für I = 1,2,3,4<br />
Hier ist I die Nummer des Freiheitsgrades und nicht die Knotennummer. Mit der dimensionslosen<br />
Koordinate ξ, für die gilt<br />
x = l 2x<br />
(ξ +1) → ξ =<br />
2 l −1<br />
lassen sich die Ableitungen schreiben als<br />
d(·)<br />
dx<br />
= d(·)<br />
dξ<br />
2<br />
l<br />
und<br />
d 2 (·)<br />
Die Ansatzkoeffizienten a 0 I ,...,a3 I<br />
dx2 = d2 (·)<br />
dξ2 4<br />
.<br />
l2 ergeben sich aus folgenden Bedingungen:<br />
I = 1 : N1(−1) = 1, ∂N1<br />
∂ξ (−1) = 0, N1(1) = 0, ∂N1<br />
(1) = 0,<br />
∂ξ<br />
I = 2 : N2(−1) = 0, ∂N2<br />
∂ξ (−1) = 1, N2(1) = 0, ∂N2<br />
(1) = 0,<br />
∂ξ<br />
I = 3 : N3(−1) = 0, ∂N3<br />
∂ξ (−1) = 0, N3(1) = 1, ∂N3<br />
(1) = 0,<br />
∂ξ<br />
I = 4 : N4(−1) = 0, ∂N4<br />
∂ξ (−1) = 0, N4(1) = 0,<br />
4<br />
∂N4<br />
(1) = 1 .<br />
∂ξ<br />
(<strong>3.</strong>36)<br />
29
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Die Lösung dieses Systems sind die sogenannten Hermite-Funktionen<br />
N1(ξ) = 1 �<br />
3<br />
2−3ξ +ξ<br />
4<br />
� ,<br />
N2(ξ) = 1 �<br />
2 3<br />
1−ξ −ξ +ξ<br />
4<br />
� ,<br />
N3(ξ) = 1 � 3<br />
2+3ξ −ξ<br />
4<br />
� ,<br />
N4(ξ) = 1 �<br />
2 3<br />
−1−ξ +ξ +ξ<br />
4<br />
� ,<br />
die in Abbildung <strong>3.</strong>16 skizziert sind. Also ergibt sich<br />
w h (ξ) = N1(ξ)w1 +N2(ξ)<br />
�<br />
= N1(ξ)<br />
1<br />
NI<br />
N2<br />
N1<br />
N3<br />
N4<br />
Abbildung <strong>3.</strong>16.: Hermite-Funktionen<br />
� �<br />
dw<br />
+N3(ξ)w2 +N4(ξ)<br />
dξ 1<br />
l<br />
2 N2(ξ) N3(ξ)<br />
l<br />
2 N4(ξ)<br />
⎡<br />
�<br />
⎢<br />
⎣<br />
w1<br />
w ′ 1<br />
w2<br />
w ′ 2<br />
ξ<br />
� �<br />
dw<br />
dξ<br />
⎤<br />
⎥<br />
⎦<br />
2<br />
(<strong>3.</strong>37)<br />
(<strong>3.</strong>38)<br />
= N(ξ)w . (<strong>3.</strong>39)<br />
Für die zweite Ableitung erhält man<br />
� w h (ξ) � ′′ = 4<br />
l 2<br />
d2wh 1<br />
=<br />
dξ2 l2 � �<br />
6ξ l(3ξ −1) −6ξ l(3ξ +1) w (<strong>3.</strong>40)<br />
= B(ξ)w (<strong>3.</strong>41)<br />
Einsetzen in die schwache Form führt zu<br />
⎛<br />
30<br />
δΠ = δw T<br />
⎜�<br />
⎜ 1<br />
⎜ B<br />
⎝ −1<br />
T (ξ)EIB(ξ) l<br />
2 dξ<br />
� �� �<br />
K e<br />
� 1<br />
w − N<br />
−1<br />
T (ξ)q(ξ) l<br />
2 dξ<br />
� �� �<br />
F e<br />
⎟ = 0.<br />
⎠<br />
⎞
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
Damit erhält man eine Elementsteifigkeitsmatrix K e und der Elementlastvektor F e . Für den<br />
Eintrag K e 11 errechnet man zum Beispiel<br />
K e 11 =<br />
� 1<br />
1<br />
l4(6ξ)2EI l EI<br />
dξ =<br />
2 2l312ξ3 �<br />
�<br />
�<br />
�<br />
−1<br />
und für den Eintrag F e 1<br />
F e 1 =<br />
� 1<br />
−1<br />
1<br />
4 (2−3ξ +ξ3 l<br />
)q0<br />
2<br />
1<br />
−1<br />
dξ = q0l<br />
2 .<br />
= 12 EI<br />
l 3<br />
Für die gesamte Elementsteifigkeitsmatrix K e mit EI = const und den Elementlastvektor<br />
F e mit q = q0 = const errechnet man<br />
K e = EI<br />
l3 ⎡<br />
12 6l −12 6l<br />
⎢ 6l 4l<br />
⎣<br />
2 −6l 2l2 −12 −6l 12 −6l<br />
6l 2l2 −6l 4l2 ⎤<br />
⎥<br />
⎦ , (<strong>3.</strong>42)<br />
F e = q0l<br />
⎡<br />
1<br />
⎢<br />
l<br />
⎢ 6<br />
2 ⎢ 1<br />
⎣<br />
− l<br />
⎤<br />
⎥ .<br />
⎥<br />
⎦<br />
6<br />
(<strong>3.</strong>43)<br />
Beachtenswert ist die Tatsache, dass die Belastung durch eine Streckenlast zu Einträgen in<br />
den Verdrehungsfreiheitsgraden, d. h. zu Einträgen in den Spalten 2 und 4 des Lastvektors<br />
führt.<br />
<strong>3.</strong>2.2.2.Ì�ÑÓ×��Ò�ÓBalken<br />
Die allgemeine Beziehungen für Kinematik, Stoffgesetz und Gleichgewicht wurde bereits in<br />
<strong>3.</strong>2.2 zur Verfügung gestellt. BeimÌ�ÑÓ×��Ò�Ó-Balken, einen schubweichen Balken, werden<br />
Absenkung w und Verdrehung β als unabhängige kinematische Größen betrachtet. Das<br />
Potential ist damit durch<br />
Π[w,β] = 1<br />
� l<br />
Mβ<br />
2 0<br />
′ dx+ 1<br />
� l � l<br />
Qγdx− qwdx<br />
2 0 0<br />
= 1<br />
� l<br />
EIβ<br />
2<br />
′2 dx+ 1<br />
� l<br />
G<br />
2<br />
Ā(w′ −β) 2 � l<br />
dx− qwdx → min. (<strong>3.</strong>44)<br />
0<br />
0<br />
gegeben. Da beide Funktionen w und β jeweils nun in der ersten Ableitung auftreten, können<br />
wir für beide Funktionen lineare Ansätze wählen.<br />
Betrachten wir zunächst aber die 1. Variation<br />
� l<br />
δΠ[w,β] = EIβ ′ δβ ′ � l<br />
dx+ GĀ(w′ −β)(δw ′ � l<br />
−δβ)dx− qδwdx = 0. (<strong>3.</strong>45)<br />
0<br />
0<br />
0<br />
0<br />
31
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Lineare Ansätze (siehe Abbildung <strong>3.</strong>17) sind wie beim Stabelement durch N1 = 1− xe<br />
l und<br />
N2 = xe<br />
gegeben. Damit lässt sich l folgendesÌ�ÑÓ×��Ò�Ó-Element generieren, das in<br />
Abbildung <strong>3.</strong>18 skizziert ist.<br />
N1<br />
xe<br />
l<br />
N2<br />
Abbildung <strong>3.</strong>17.: Lineare Ansätze für Balkengrößen<br />
β1<br />
w1<br />
Abbildung <strong>3.</strong>18.: Freiheitsgrade desÌ�ÑÓ×��Ò�Ó-Elements<br />
Für Absenkung w h und Verdrehung β h des <strong>Elemente</strong>s gilt<br />
w h = N1w1 +N2w2<br />
β h = N1β1 +N2β2.<br />
Mit dem Unbekanntenvektor u e für ein Element<br />
u e =<br />
⎡<br />
⎢<br />
⎣<br />
w1<br />
β1<br />
w2<br />
β2<br />
⎤<br />
⎥<br />
⎦<br />
β2<br />
w2<br />
(<strong>3.</strong>46)<br />
können wir folgende Matrixschreibweise einführen, wobei wir durch den Index w bzw. β die<br />
Ansatzfunktionen unterscheiden.<br />
32<br />
wh = � N1 0 N2 0 � ue = Nwue ; δwh = Nwδue = (δue ) TN T<br />
w<br />
βh = � �<br />
e 0 N1 0 N2 u = Nβue ; δβh = Nβδue = (δue ) TN T<br />
β<br />
w h′ = � − 1<br />
l 0 1<br />
βh′ = � 0 −1 0 l 1<br />
l<br />
0 l � ue = Bwue ; δwh′ = Bwδue = (δue ) TB T<br />
w<br />
�<br />
e u = Bβue ; δβh′ = Bβδue = (δue ) TB T<br />
β
01<br />
01<br />
01<br />
01<br />
01<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
2l<br />
Abbildung <strong>3.</strong>19.: Beispiel eines durch eine Einzelkraft belasteten Balkens<br />
Einsetzen dieser Ausdrücke in die 1. Variation (<strong>3.</strong>45) liefert dann<br />
δΠ h e = (δue ) T<br />
��� � le<br />
le�<br />
T<br />
+ Bw −NT<br />
�<br />
β GĀ � �<br />
�<br />
Bw −N β dx u e<br />
B<br />
0<br />
T<br />
βEIB βdx � �� �<br />
K e<br />
MM<br />
� le<br />
−<br />
0<br />
N T<br />
w qdx<br />
Durch (<strong>3.</strong>47) lassen sich Biegesteifigkeitsmatrix K e<br />
MM<br />
ausrechnen:<br />
K e<br />
MM<br />
= EI<br />
l<br />
K e GĀ<br />
QQ =<br />
l<br />
⎡<br />
⎢<br />
⎣<br />
⎡<br />
⎢<br />
⎣<br />
�<br />
0 0 0 0<br />
0 1 0 −1<br />
0 0 0 0<br />
0 −1 0 1<br />
β2<br />
F<br />
w2<br />
0 � ��<br />
K<br />
�<br />
e<br />
QQ<br />
. (<strong>3.</strong>47)<br />
⎤<br />
⎥<br />
⎦<br />
1 l<br />
2 −1 l<br />
2<br />
l<br />
2<br />
l 2<br />
3 −l<br />
2<br />
l 2<br />
6<br />
−1 − l<br />
2 1 − l<br />
2<br />
l<br />
2<br />
K e = K e<br />
MM +Ke<br />
QQ<br />
l 2<br />
6 −l<br />
2<br />
l 2<br />
3<br />
⎤<br />
⎥<br />
⎦<br />
und Querkraftsteifigkeitsmatrix Ke<br />
QQ<br />
(<strong>3.</strong>48)<br />
(<strong>3.</strong>49)<br />
. (<strong>3.</strong>50)<br />
Als Beispiel betrachten wir den eingespannten Balken aus Abbildung <strong>3.</strong>19. Durch die Randbedingungen<br />
werden erste und zweite Zeile und Spalte in den jeweiligen Steifigkeitsmatrizen<br />
gestrichen und es ergibt sich das Gesamtsystem<br />
� � �<br />
EI 0 0<br />
+<br />
2l 0 1<br />
GĀ<br />
�<br />
1 −l<br />
4<br />
2l −l 3l2 ���<br />
w2<br />
β2<br />
Das liefert die Gleichungen<br />
− GĀ<br />
2 w2 +<br />
GĀ 2l w2 − GĀ<br />
2 β2 = F ,<br />
�<br />
EI 2<br />
+<br />
2l 3 GĀl<br />
�<br />
β2 = 0 .<br />
�<br />
=<br />
� F<br />
0<br />
�<br />
33
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
Für einen Rechteckquerschnitt mit Breite b und Höhe h gilt: I = bh3<br />
12<br />
Lösung des Gleichungssystems liefert die Absenkung w2:<br />
w2 = 8Fl(α2 +6)<br />
G Ā(α2 +24) , α = 4√ 3 b<br />
h .<br />
Für einen schlanken Balken (h → 0) erhält man im Grenzwert das Ergebnis<br />
5 und Ā = bh. Die 6<br />
w2 = 8Fl<br />
GĀ = 4wSchub �= wBiegung.<br />
Dieses problematische Verhalten desÌ�ÑÓ×��Ò�Ó-Balken bezeichnet man als locking“,<br />
”<br />
da das Element zu steif reagiert und die Biegedeformation wBiegung = 8Fl3 unterdrückt wird.<br />
3EI<br />
Dieses Verhalten kann durch eine gemischte Elementformulierung behoben werden. Hierzu<br />
betrachten wir erneut das Gesamtpotential eines Balkens.<br />
Π[w,β] = 1<br />
� l<br />
EIβ<br />
2 0<br />
′2 dx+ 1<br />
� l<br />
G<br />
2 0<br />
Ā(w′ −β) 2 dx−Last ,<br />
wobeiwirdenLasttermnichtweiterbetrachtenwollen.UnterderEinbeziehungvonM = EIβ ′<br />
und Q = GĀγ können wir eine gemischte Formulierung erzeugen, bei der neben den kinematischen<br />
Größen w und β auch die Größen M und Q auftauchen:<br />
Π[w,β,Q,M] = 1<br />
� l<br />
(Mβ<br />
2 0<br />
′ +Qγ) dx<br />
� l��<br />
= Mβ ′ − 1M<br />
2<br />
2�<br />
�<br />
+ Qγ −<br />
EI<br />
1 Q<br />
2<br />
2<br />
GĀ ��<br />
dx → stat.<br />
0<br />
Im Gleichgewichtsverhältnis muss dieses Funktional einen Stationärwert annehmnen. Die Minimumseigenschaft<br />
geht bei der gemischten Formulierung verloren. Imweiteren konzentrieren<br />
wir uns auf eine bezüglich Q gemischte Formulierung, d.h.<br />
Π[w,β,Q] = 1<br />
� l<br />
EIβ<br />
2 0<br />
′2<br />
� l<br />
dx+ Q(w<br />
0<br />
′ −β) dx− 1<br />
� l<br />
Q<br />
2 0<br />
2<br />
dx . (<strong>3.</strong>51)<br />
GĀ Für die erste Variation erhält man daher<br />
� l<br />
δΠ[w,β,Q] = EIβ<br />
0<br />
′ δβ ′ � l<br />
dx+ Q(δw<br />
0<br />
′ � l<br />
−δβ) dx+ δQ(w<br />
0<br />
′ −β) dx<br />
� l<br />
Q<br />
− = 0.<br />
GĀδQdx (<strong>3.</strong>52)<br />
0<br />
Definieren wir nun ein Element mit den in Abbildung <strong>3.</strong>20 skizzierten Freiheitsgraden<br />
34<br />
û e = � w1 β1 w2 β2 Q � T = � (u e ) T Q � T<br />
(<strong>3.</strong>53)
β1<br />
w1<br />
<strong>3.</strong>2. FE Diskretisierung gewöhnlicher Differentialgleichungen<br />
Q β2<br />
Abbildung <strong>3.</strong>20.: Freiheitsgrade für gemischte Formulierung<br />
d.h. w und β sind linear im Element, während Q als konstant über die gesamte Elementlänge<br />
angenommen wird. Damit gilt folgende Darstellung für die interpolierten Felder:<br />
w h = � N1 0 N2 0 0 � û e = ˆN wû e<br />
β h = � 0 N1 0 N2 0 � û e = ˆN βû e<br />
Q h = � 0 0 0 0 1 � û e = ˆN Q û e .<br />
Analog zu vorher lassen sich (w h ) ′ ,(β h ) ′ und die virtuellen Verrückungen ausdrücken. Setzt<br />
man diesen Ansatz in die Variation (<strong>3.</strong>52) ein, so erhält man für ein Element<br />
δΠ h e = (δu e ) T<br />
� le<br />
+<br />
ˆK e<br />
0<br />
ˆN T<br />
Q<br />
��� le<br />
ˆN<br />
0<br />
T<br />
� le�<br />
βEI ˆB βdx+ ˆN<br />
0<br />
T<br />
w − ˆN T<br />
�<br />
ˆN β Qdx<br />
� � � le<br />
ˆN w − ˆN β dx+ ˆN T 1<br />
Q<br />
GĀ ˆN<br />
� �<br />
Q dx ue = K e MM +K e MQ +K e QM +K e QQ<br />
⎡<br />
0 0 0 0 −1<br />
⎢ EI<br />
⎢<br />
0 0 − le<br />
= ⎢<br />
⎣<br />
EI<br />
le −le<br />
0 0 0 0<br />
0 −<br />
2<br />
1<br />
EI EI 0 le le<br />
−le −1 −<br />
2<br />
le 1 − 2 le<br />
⎤<br />
2<br />
⎥<br />
⎦<br />
0<br />
− le<br />
G Ā<br />
w2<br />
(<strong>3.</strong>54)<br />
DaQinjedemElementkonstantistunddamitnichtvondenNachbarelementen abhängt(vgl.<br />
Abbildung<strong>3.</strong>21)kannQauf<strong>Elemente</strong>nebeneherauskondensiertwerden. MitGleichung (<strong>3.</strong>53)<br />
lässt sich das Gleichungssystem schreiben als<br />
� K e<br />
MM Ke<br />
MQ<br />
K e<br />
QM Ke<br />
QQ<br />
�� � � �<br />
e e<br />
u F<br />
=<br />
Q 0<br />
Aus der letzten Zeile lässt sich Q bestimmen:<br />
K e<br />
QM ue +K e<br />
QQ<br />
Q = 0<br />
❀ Q = − � K e �<br />
−1 e<br />
QQ ) KQM ue .<br />
(<strong>3.</strong>55)<br />
35
<strong>3.</strong> <strong>Finite</strong>-<strong>Elemente</strong>-<strong>Methode</strong> (<strong>FEM</strong>)<br />
000 111<br />
000 111<br />
Q<br />
00 11<br />
00 11<br />
00 11<br />
Abbildung <strong>3.</strong>21.: Querkraft konstant auf <strong>Elemente</strong>bene<br />
Setzt man dies wieder in (<strong>3.</strong>55) ein, so erhält man eine reine Verschiebungsformulierung in<br />
den Unbekannten (w,β)<br />
F e = K e<br />
MM ue +K e<br />
MQQ = � K e<br />
MM −Ke<br />
� � � e −1 e<br />
MQ KQQ ) KQM � �� �<br />
K e<br />
u e ,<br />
mit der folgenden Steifigkeitsmatrix K e :<br />
K e = K e<br />
MM + GĀ<br />
⎡ le 1 2<br />
⎢<br />
le ⎢<br />
⎣<br />
−1<br />
le<br />
2<br />
le l<br />
2<br />
2 e<br />
4 −le<br />
l<br />
2<br />
2 e<br />
4<br />
−1 −le 1 − 2 le<br />
2<br />
36<br />
le<br />
2<br />
l2 e<br />
4 −le<br />
2<br />
l 2 e<br />
4<br />
⎤<br />
⎥<br />
⎦<br />
(<strong>3.</strong>56)