Kapitel II.1 - Lehrstuhl Numerische Mathematik
Kapitel II.1 - Lehrstuhl Numerische Mathematik
Kapitel II.1 - Lehrstuhl Numerische Mathematik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Teil IV Eigenwertprobleme<br />
<strong>II.1</strong> Aufgabenstellung<br />
II.2 Direkte Vektoriteration<br />
II.3 Inverse Vektoriteration<br />
II.4 QR-Iteration<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (eigeninhalt) 1
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Beispiel 1: Eigenschwingung - Problembeschreibung<br />
Zweidimensionales Tragwerk modelliert mit 18 elastischen Stäben und 8 Gelenken:<br />
4<br />
14<br />
5<br />
z_1 z_2 z_3 z_4<br />
1 2 3<br />
6<br />
z_5 15<br />
7<br />
9<br />
8<br />
z_6 16<br />
10<br />
z_7<br />
11<br />
12<br />
17 z_8 18<br />
Hierbei sind die Gelenke mit den Knoten zi ∈ R 2 ,i = 1,...,8 assoziiert.<br />
Ein Stab k verbindet die Knoten zi und zj miteinander, wobei lk := �zi − zj�,k =<br />
1,...,18, die Länge des Stabs k, fk,k = 1,...,18 die Kraftbeträge in den jeweiligen<br />
Stäben sind und pi,i = 1,...,8, die äußere Kraft am Gelenk beschreibt.<br />
M.Hanke-Bourgeois: Grundlagen der <strong>Numerische</strong>n <strong>Mathematik</strong> und des<br />
Wissenschaftlichen Rechnens, 3.Auflage, Teubner 2009, S.41ff<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg57) 2<br />
13
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Beispiel 1: Eigenschwingung - Gleichgewichtsgleichung<br />
Es seien p = � pT 1,...,p T �T, 8 mit pi ∈ R2 , und f = (fk)1≤k≤18. Weiter seien<br />
c := cos(θ) und s := sin(θ).<br />
Dann liefert das statische Gleichgewicht an z1<br />
0 = p1+f1<br />
� �<br />
1<br />
0<br />
+f4<br />
� �<br />
−c<br />
−s<br />
+f5<br />
� �<br />
0<br />
.<br />
−1<br />
Betrachtet man alle Gleichgewichtsbedingungen an den acht Gelenken zusammen, so<br />
ergibt sich<br />
p = Ef,<br />
wobei E ∈ R 16×18 die Gleichgewichtsmatrix beschreibt.<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg58) 3
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
E =<br />
Beispiel 1: Eigenschwingung - Gleichgewichtsmatrix E<br />
Die Gleichgewichtsmatrix ist gegeben durch<br />
⎛<br />
⎜<br />
⎝<br />
−1 c<br />
s 1<br />
1 −1 c −c<br />
s 1 s<br />
1 −1 c −c<br />
s 1 s<br />
1 −c<br />
1 s<br />
−c 1 −1<br />
−1 −s<br />
−c 1 −1<br />
−1 −s<br />
c 1 −1<br />
−s −1<br />
c 1 −1<br />
−s −1<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg61) 4<br />
⎞<br />
⎟<br />
⎠
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Beispiel 1: Eigenschwingung - Eigenwertproblem I<br />
Annahme: Die Länge der Stäbe ändert sich unter Deformation.<br />
Seien x ∈ R 16 der Verschiebungsvektor und d ∈ R 18 der Verzerrungsvektor. Dann<br />
befinden sich die Gelenke nach Deformation an den Knoten zi +xi ∈ R 2 ,i = 1,...,8.<br />
Die neue Stablänge beträgt dann lk +dk,k = 1,...,18, und berechnet sich aus<br />
(lk +dk) 2 = �zi −zj� 2 +2(zi−zj) T (xi−xj)+�xi −xj� 2 .<br />
Mit Vernachlässigung der d2 k-Terme folgt<br />
Hierbei beschreibt (zi−zj)<br />
�zi−zj�<br />
dk ≈<br />
� �T (zi−zj)<br />
�zi−zj�<br />
(xi−xj).<br />
wie zuvor den Richtungsvektor des k-ten Stabes mit<br />
entsprechendem Vorzeichen. Also folgt<br />
d = E T x.<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg59) 5
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Beispiel 1: Eigenschwingung - Eigenwertproblem II<br />
Sei L = diag(lk). Dann folgt mit dem Hookeschen Gesetz<br />
fk = η dk<br />
, also f = ηL −1 D,<br />
wobei η der Youngsche Elastizitätsmodul ist. Damit folgt<br />
lk<br />
p = Ax, mit A = ηEL −1 E T ∈ R 16×16 .<br />
Man betrachtet nun das dynamische System<br />
mx ′′ (t) = −Ax(t),<br />
wobei m die Masse eines Glenkes beschreibt.<br />
Sie m = 1 an jedem Gelenk und λ der Eigenwert der Matrix A zum Eigenvektor v.<br />
Dann ist<br />
x(t) = cos( � (λ)t)v<br />
eine Lösung des dynamischen Systems.<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg62) 6
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Beispiel 1: Eigenschwingung - Eigenschwingungen<br />
1. Eigenschwingung: λ=0.35986<br />
6. Eigenschwingung: λ=9.2956<br />
3. Eigenschwingung: λ=2.8027<br />
8. Eigenschwingung: λ=15.4855<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg60) 7
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
11. Eigenschwingung: λ=23.8678 13. Eigenschwingung: λ=31.3916<br />
15. Eigenschwingung: λ=35.9723<br />
16. Eigenschwingung: λ=46.1454<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg60) 8
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Vektoriteration (Bsp. 1): symmetrische Matrix<br />
⎛ ⎞⎛<br />
⎞<br />
0 2 2 1<br />
⎛ ⎞<br />
10<br />
⎝2<br />
6 2⎠⎝2⎠<br />
= ⎝20⎠<br />
2 2 8 3 30<br />
λ1 = 10, λ2 ≈ 4.83<br />
�<br />
�<br />
�<br />
�<br />
λ2<br />
λ1<br />
�<br />
�<br />
�<br />
� ≈ 0.483<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
10 −8<br />
10 −10<br />
10 −12<br />
10 −14<br />
10 −16<br />
C*(λ 2 /λ 1 ) 2k<br />
C*(λ 2 /λ 1 ) k<br />
error of eigenvalue<br />
error eigenvector<br />
1 5 10 15 20 30<br />
Step k<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg48) 9
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Vektoriteration (Bsp. 2): symmetrische Matrix<br />
⎛ ⎞⎛<br />
⎞<br />
1 3 1 1<br />
⎛ ⎞<br />
10<br />
⎝3<br />
−2 7⎠⎝2⎠<br />
= ⎝20⎠<br />
1 7 5 3 30<br />
λ1 = 10, λ2 ≈ −6.87<br />
�<br />
�<br />
�<br />
�<br />
λ2<br />
λ1<br />
�<br />
�<br />
�<br />
� ≈ 0.687<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
10 −8<br />
10 −10<br />
10 −12<br />
10 −14<br />
10 −16<br />
C*(λ 2 /λ 1 ) 2k<br />
C*(λ 2 /λ 1 ) k<br />
error of eigenvalue<br />
error eigenvector<br />
1 5 10 15 20 30<br />
Step k<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg49) 10
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
�<br />
�<br />
�<br />
�<br />
A =<br />
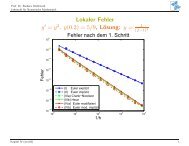
Vektoriteration (Bsp. 3): symmetrische Matrix<br />
⎛ ⎞<br />
−7 13 −16<br />
⎝ 13 −10 13 ⎠,<br />
−16 13 7<br />
λ1 ≈ −32,22 λ2 ≈ 18,21,<br />
�<br />
�<br />
�<br />
� ≈ 0,5652,<br />
⎛<br />
x1 = ⎝ 0.62<br />
⎞<br />
−0.63⎠,<br />
x<br />
0.46<br />
(0) ⎛<br />
= ⎝ 1<br />
⎞<br />
0⎠<br />
0<br />
λ2<br />
λ1<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
10 −8<br />
10 −10<br />
10 −12<br />
10 −14<br />
10 −16<br />
C*(λ 2 /λ 1 ) 2k<br />
C*(λ 2 /λ 1 ) k<br />
Fehler Eigenwert<br />
Fehler Eigenvektor<br />
1 5 10 15 20<br />
k−ter Schritt<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg49b) 11
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Vektoriteration (Bsp. 4): unsymmetrische Matrix<br />
⎛ ⎞<br />
5 4 4 5 6<br />
⎜<br />
⎜0<br />
8 5 6 7 ⎟<br />
A = ⎜<br />
⎜0<br />
0 6 7 8 ⎟<br />
⎝0<br />
0 0 −4 9 ⎠<br />
0 0 0 0 −2<br />
,<br />
� �<br />
�λ2�<br />
λ1 = 8, λ2 = 6, � �<br />
3<br />
�λ1<br />
� =<br />
4 ,<br />
x1 = 1<br />
⎛ ⎞<br />
4<br />
⎜<br />
⎜3<br />
⎟<br />
⎜<br />
5⎜0<br />
⎟<br />
⎝0⎠<br />
0<br />
, x(0) = 1 ⎛ ⎞<br />
1<br />
⎜<br />
⎜1<br />
⎟<br />
√ ⎜<br />
5<br />
⎜1<br />
⎟<br />
⎝1⎠<br />
1<br />
10 0<br />
10 −2<br />
10 −4<br />
10 −6<br />
C*(λ 2 /λ 1 ) k<br />
Fehler Eigenwert<br />
Fehler Eigenvektor<br />
1 5 10 15 20 25 30<br />
k−ter Schritt<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg48b) 12
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
Inverse Vektoriteration: A symmetrisch<br />
Als Beispiel betrachten wir die Matrix<br />
mit den Eigenwerten<br />
A =<br />
⎛<br />
−7<br />
⎞<br />
13 −16<br />
⎝ 13 −10 13 ⎠<br />
−16 13 7<br />
λ1 = −32.2245, λ2 = 18.2051, λ3 = 4.0194.<br />
Ausgehend von verschiedenen Werten für λ führen wir 15 Schritte der inversen<br />
Vektoriteration mit dem Startvektor x (0) = (1, 0, 0) ⊤ aus.<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg50b) 13
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für <strong>Numerische</strong> <strong>Mathematik</strong><br />
20<br />
0<br />
−20<br />
Inverse Vektoriteration: symmetrische Matrix<br />
λ = 11.7<br />
−40<br />
0 5 10 15<br />
20<br />
0<br />
−20<br />
λ = −12.5<br />
−40<br />
0 5 10 15<br />
20<br />
0<br />
−20<br />
λ = 10.7<br />
−40<br />
0 5 10 15<br />
20<br />
0<br />
−20<br />
λ = −15.5<br />
−40<br />
0 5 10 15<br />
20<br />
0<br />
−20<br />
λ = 6<br />
−40<br />
0 5 10 15<br />
20<br />
0<br />
−20<br />
λ = −25<br />
−40<br />
0 5 10 15<br />
<strong>Kapitel</strong> <strong>II.1</strong>-II.3 (linalg51b) 14

![Vergleich Gradientenverfahren und CG-Verfahren A = [4 0; 0 4] , b ...](https://img.yumpu.com/22549864/1/190x135/vergleich-gradientenverfahren-und-cg-verfahren-a-4-0-0-4-b-.jpg?quality=85)