Einteilung von partiellen Differentialgleichungen - Lehrstuhl ...
Einteilung von partiellen Differentialgleichungen - Lehrstuhl ...
Einteilung von partiellen Differentialgleichungen - Lehrstuhl ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Inhalt des Kapitels<br />
II. <strong>Einteilung</strong> <strong>von</strong> <strong>partiellen</strong> <strong>Differentialgleichungen</strong><br />
II.1. Motivation und Beispiele<br />
II.2. Typeinteilung partieller <strong>Differentialgleichungen</strong><br />
II.3. Wohlgestelltheit nach Hadamard<br />
Kapitel II (UebersichtKapII) 1
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Crashtest: Realität → Simulation<br />
www.arasvo.com/crown victoria/crown vic.htm<br />
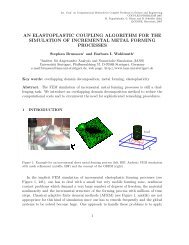
1997 Ford Crown Victoria Entfernung <strong>von</strong> Komponenten Oberflächendiskretisierung<br />
Volumendiskretisierung fertiges Modell Simulationsergebnis<br />
Kapitel II (motivation 01) 2
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Biomechanik<br />
www.volpe.dot.gov/safety/biomodeling.html, www.eng.tau.ac.il/˜msbm/<br />
• FE Crash Test Dummy<br />
• Simulation <strong>von</strong> Verletzungen<br />
nach Verkehrsunfällen<br />
• Links: Rattengehirn<br />
• Rechts: Simulierte Verteilung <strong>von</strong><br />
Deformationen der Hirnrinde augrund<br />
einer traumatischen Hirnverletzung<br />
Kapitel II (motivation 02) 3
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Strömungsmechanik: Der virtuelle Windkanal<br />
www-isl.mach.uni-karlsruhe.de<br />
Flügeloberfläche<br />
Ausschnitt aus dem 3D-Gitter<br />
Druckverteilungen<br />
Querschnitt<br />
Kapitel II (motivation 03) 4
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Erdbebensimulation<br />
T. Furumura, Journal of the Earth Simulator 3, 2005<br />
Kapitel II (motivation 04) 5
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Strukturmechanik: Stabilität <strong>von</strong> Bauwerken<br />
www.dynardo.de<br />
Kapitel II (motivation 05) 6
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Navier–Stokes Gleichungen<br />
Die Navier–Stokes Gleichungen sind ein System partieller Differenzialgleichungen<br />
zweiter Ordnung bestehend aus dem Impulssatz und der Kontinuitätsgleichung.<br />
Hauptsächlichwerdensie in der Strömungsmechanikverwendetum die Strömungen<br />
<strong>von</strong> Flüssigkeiten und Gasen zu beschreiben.<br />
Gesucht ist das Geschwindigkeitsfeld u ∈ R d , d ∈ {2,3}, und der Druck p ∈ R, die<br />
in Ω ⊂ R d dem System<br />
−div(ν∇u)+̺(u·∇)u+∇p = f<br />
div u = 0<br />
und zusätzlichen Randbedingungen auf Γ := ∂Ω genügen.<br />
• f(x) ∈ R d ,x ∈ Ω: Volumenkraft<br />
• ν > 0: kinematische Viskosität<br />
Kapitel II (einleitung36) 7
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Navier–Stokes Gleichungen<br />
Historisches<br />
Claude Navier (1785 – 1836)<br />
• Der Impulssatz für newtonische Fluide, z.B. für<br />
Wasser, wurde <strong>von</strong> Navier und Stokes unabhängig<br />
im 19. Jahrhundert formuliert. Obwohl die<br />
Gleichungen bereits zwei Jahre vor Stokes <strong>von</strong><br />
Saint–Venant hergeleitet wurden, setzte sich der<br />
Name Navier–Stokes Gleichungen durch.<br />
• Bis heute gibt es keine allgemeinen Resultate<br />
über die theoretische Wohlgestelltheit der Navier–<br />
Stokes Gleichungen.<br />
George Stokes (1819 – 1903)<br />
Kapitel II (einleitung38) 8
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Navier–Stokes Gleichungen<br />
Beispiel<br />
Simulation einer turbulenten Strömung mit Hilfe der Navier–Stokes Gleichungen<br />
zum Zeitpunkt t = 0 und zum Endzeitpunkt.<br />
Kapitel II (einleitung37) 9
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Lineare Elastizität<br />
Historisches<br />
• Cauchy leistete mehrere Beiträge zur<br />
Elastizitätstheorie. Zum einen entwickelte er den<br />
Cauchy–Spannungstensor eines Würfels, mit welchem<br />
die Spannung in einem Punkt eines elastischen Körpers<br />
vollständig beschrieben werden kann.<br />
Augustin Cauchy<br />
(1789 – 1857)<br />
• Mit Hilfe der Cauchy–Zahl kann man Aussagen<br />
über die Ähnlichkeit im Elastizitätsverhalten zweier<br />
Körper machen. Die Cauchy–Zahl ist das Verhältnis<br />
der Trägheitskräfte zu den elastischen Kräften bei<br />
Schwingungen des Schalls in einem Körper.<br />
Kapitel II (einleitung39) 10
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Typeinteilung<br />
Die allgemeine lineare Differentialgleichung zweiter Ordnung in n Variablen<br />
x = (x 1 ,...,x n ) lautet:<br />
n∑<br />
i,j=1<br />
a ij (x) ∂2 u<br />
∂x i x j<br />
+<br />
n∑<br />
i=1<br />
a i (x) ∂u<br />
∂x i<br />
+a(x) = f(x).<br />
A := (a ij ) 1≤i,j≤n ; A = A T<br />
d.h. die Eigenwerte der Koeffizientenmatrix sind reell.<br />
Kapitel II (einleitung02) 11
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Typeinteilung<br />
• elliptisch in x: Alle n Eigenwerte der Matrix A(x) haben dasselbe Vorzeichen<br />
• parabolisch in x: Ein Eigenwert ist gleich 0. Die übrigen n−1 Eigenwerte<br />
besitzen dasselbe Vorzeichen. Es gilt zusätzlich: rang(A(x),a(x)) = n, wobei<br />
a(x) = (a 1 (x),...,a n (x)) T gilt<br />
• hyperbolisch in x: n−1 Eigenwerte besitzen dasselbe Vorzeichen, der restliche<br />
Eigenwert hat das entgegengesetzte Vorzeichen.<br />
• Die lineare PDE zweiter Ordnung ist elliptisch/parabolisch/hyperbolisch auf<br />
Ω ⊂ R n , (Ω offen), wenn sie in allen x ∈ Ω elliptisch/parabolisch/hyperbolisch<br />
ist.<br />
Kapitel II (einleitung02a) 12
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Elliptische partielle Differenzialgleichungen<br />
Prototyp: Laplace Operator ∆<br />
∆ =<br />
d∑<br />
i=1<br />
∂ 2<br />
∂x 2 i<br />
, A =<br />
⎛<br />
⎝ 1 ...<br />
Zusätzlich müssen Randdaten auf dem Rand Γ := ∂Ω des Gebietes Ω ⊂ R d<br />
vorgegeben werden:<br />
⎞<br />
⎠<br />
1<br />
1. Dirichlet Randbedingungen: −∆u = f in Ω, u = g auf Γ<br />
2. Neumann Randbedingungen: −∆u = f in Ω,<br />
∂u<br />
∂n = p auf Γ<br />
3. Robin Randbedingungen: −∆u = f in Ω,<br />
∂u<br />
∂n<br />
+u = r auf Γ<br />
Kapitel II (einleitung03) 13
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Elliptische partielle <strong>Differentialgleichungen</strong><br />
Dirichlet Randbedingungen<br />
Dirichlet Randwertproblem:<br />
−∆u= f in Ω<br />
u= g auf Γ := ∂Ω<br />
• Ω Einheitsquadrat (0,1)×(0,1)<br />
• f(x,y) = 20π 2 sin(2πx)sin(4πy)<br />
• g(x,y) = 0<br />
• exakte Lösung u(x,y) = sin(2πx)sin(4πy)<br />
Kapitel II (einleitung15) 14
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Dirichlet Randbedingungen - Beispiel<br />
Color: u Height: u<br />
0.8<br />
1<br />
0.6<br />
0.5<br />
0.4<br />
0.2<br />
0<br />
0<br />
−0.5<br />
−0.2<br />
−1<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
0<br />
0.2<br />
0.4<br />
0.6<br />
0.8<br />
1<br />
−0.4<br />
−0.6<br />
−0.8<br />
Kapitel II (einleitung16) 15
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Elliptische partielle <strong>Differentialgleichungen</strong><br />
Neumann Randbedingungen<br />
Neumann Randwertproblem:<br />
• Ω Einheitsquadrat (0,1)×(0,1)<br />
−∆u= f in Ω<br />
∂u<br />
= g auf Γ := ∂Ω<br />
∂n<br />
• f(x,y) = (1−2x)y 2 (2y −3)+(1−2y)x 2 (2x−3)<br />
• g(x,y) = 0<br />
• exakte Lösung u(x,y) = 1 6 x2 (2x−3)y 2 (2y −3)<br />
Kapitel II (einleitung18) 16
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Neumann Randbedingungen - Beispiel<br />
0.18<br />
0.16<br />
0.14<br />
0.12<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
0.02<br />
0<br />
−0.02<br />
1<br />
0.8<br />
0.6<br />
1<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.16<br />
0.14<br />
0.12<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
0.4<br />
0.2<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
0.1<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
0.02<br />
0<br />
∫<br />
∫<br />
Kompatibilitätsbedingung<br />
Ω<br />
f dx = −<br />
∂Ω<br />
gds<br />
Kapitel II (einleitung19) 17
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Elliptische partielle <strong>Differentialgleichungen</strong><br />
Gemischte Randbedingungen<br />
Beispiel<br />
−∆u = 1 in Ω<br />
∂u<br />
= 0 auf —–<br />
∂n<br />
⎧<br />
1 auf —–<br />
⎪⎨<br />
2 auf —–<br />
u =<br />
3 auf —–<br />
⎪⎩ 4 auf —–<br />
1<br />
4<br />
2<br />
3<br />
Kapitel II (einleitung20) 18
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Gemischte Randbedingungen - Beispiel<br />
2<br />
4<br />
3.5<br />
3<br />
2.5<br />
1.5<br />
1<br />
0.5<br />
2<br />
1.5<br />
2<br />
1<br />
0<br />
−0.5<br />
1<br />
−1<br />
0<br />
−1<br />
−2<br />
−2<br />
−1.5<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
1.5<br />
2<br />
−1.5<br />
−2<br />
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2<br />
Kapitel II (einleitung21) 19
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Elliptische partielle <strong>Differentialgleichungen</strong><br />
Robin Randbedingungen<br />
Robin Randwertproblem:<br />
∂u<br />
∂n<br />
• Ω Einheitsquadrat (0,1)×(0,1)<br />
• f(x,y) = 1<br />
• g(x,y) = sin(2πx)cos(4πy)<br />
−∆u= f in Ω<br />
+u= g auf Γ := ∂Ω<br />
Kapitel II (einleitung22) 20
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Robin Randbedingungen - Beispiel<br />
1<br />
0.45<br />
0.4<br />
0.35<br />
0.3<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
1<br />
0.8<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.6<br />
0.2<br />
0.4<br />
0.2<br />
0<br />
0<br />
0.2<br />
0.4<br />
0.6<br />
0.8<br />
1<br />
0.1<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Kapitel II (einleitung23) 21
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Parabolische Differenzialgleichungen<br />
Prototyp: Wärmeleitungsgleichung<br />
L = ∂ ∂t −∆,<br />
⎛<br />
0<br />
A = ⎜<br />
⎝<br />
−1<br />
...<br />
⎞<br />
⎟<br />
⎠<br />
−1<br />
Für die Lösung u(t,x) mit t ≥ t 0 und x ∈ Ω ⊂ R d muss zusätzlich zu der<br />
Randbedingung eine Anfangsbedingung vorgegeben werden:<br />
∂<br />
∂t u−∆u =f für x ∈ Ω, t ≥ t 0,<br />
z.B. Dirichlet RB: u(t,x) = g(t) für x ∈ Γ D , t ≥ t 0 ,<br />
oder Neumann RB:<br />
∂u<br />
∂n (t,x) = p(t) für x ∈ Γ N, t ≥ t 0 ,<br />
u(t 0 ,x) :=u 0 (x) für x ∈ Ω<br />
Kapitel II (einleitung04) 22
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Parabolische <strong>Differentialgleichungen</strong><br />
Prototyp: Wärmeleitungsgleichung<br />
Beispiel<br />
∂ t u−∆u = f für x ∈ Ω, t ≥ t 0 = 0<br />
• Ω Quadrat (−1,1)×(−1,1)<br />
• f = 1<br />
• u = 0 auf ∂Ω<br />
• Anfangswertbedingung<br />
u(t 0 ,x) = u 0 (x) =<br />
{<br />
1 falls x ∈ B 0.4 (0)<br />
0 sonst<br />
Kapitel II (einleitung24) 23
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Wärmeleitungsgleichung - Beispiel<br />
1<br />
0.8<br />
1<br />
0.8<br />
0.6<br />
0.6<br />
0.4<br />
0.4<br />
0.2<br />
0.2<br />
0<br />
1<br />
0<br />
1<br />
t = 0<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
t = 0.025<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
1<br />
1<br />
0.8<br />
0.8<br />
0.6<br />
0.6<br />
0.4<br />
0.4<br />
0.2<br />
0.2<br />
0<br />
1<br />
0<br />
1<br />
t = 0.05<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
t = 0.075<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
Kapitel II (einleitung25) 24
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Hyperbolische Differenzialgleichungen<br />
Prototyp: Wellengleichung<br />
L = ∂2<br />
∂t 2 −∆,<br />
⎛<br />
1<br />
A = ⎜<br />
⎝<br />
−1<br />
...<br />
⎞<br />
⎟<br />
⎠<br />
−1<br />
Für die Lösung u(t,x) mit t ≥ t 0 und x ∈ Ω ⊂ R d müssen zusätzlich<br />
Randbedingungen und Anfangsbedingung vorgegeben werden:<br />
• Randbedingungen: Γ := ∂Ω = Γ D ∪Γ N mit Γ N ∩Γ D = ∅<br />
u = g auf Γ D ,<br />
∂u<br />
∂n = p auf Γ N für t ≥ t 0<br />
• Anfangsbedingungen: u(t 0 ,x) = u 0 (x) und ∂ ∂t u(t 0,x) = u 1 (x) für x ∈ Ω<br />
Kapitel II (einleitung05) 25
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
• Ω Quadrat (−1,1)×(−1,1)<br />
Hyperbolische <strong>Differentialgleichungen</strong><br />
Prototyp: Wellengleichung<br />
∂ tt u−∆u = 0 für x ∈ Ω, t ≥ t 0 = 0<br />
• u = 0 auf dem linken und rechten Rand<br />
• ∂u<br />
∂n<br />
= 0 auf dem oberen und unteren Rand<br />
• Anfangswertbedingungen<br />
u(t 0 ,x) = u 0 (x) = arctan(cos( π 2 x 1))<br />
∂ t u 0 (x) = u 1 (x) = 3sin(πx)exp(sin( π 2 x 2))<br />
Kapitel II (einleitung26) 26
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Wellengleichung - Beispiel<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
1<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
1<br />
t = 0<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
t = 0.5<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
1<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
1<br />
t = 0.83<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
t = 1.17<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
1<br />
Kapitel II (einleitung27) 27
Prof. Dr. Barbara Wohlmuth<br />
<strong>Lehrstuhl</strong> für Numerische Mathematik<br />
Korrekt gestellte Probleme<br />
1. Existenz einer Lösung<br />
2. Eindeutigkeit der Lösung<br />
3. stetige Abhängigkeit der Lösung <strong>von</strong><br />
den Problemdaten<br />
J. Hadamard (1865 -1963)<br />
Kapitel II (general05) 28
![Vergleich Gradientenverfahren und CG-Verfahren A = [4 0; 0 4] , b ...](https://img.yumpu.com/22549864/1/190x135/vergleich-gradientenverfahren-und-cg-verfahren-a-4-0-0-4-b-.jpg?quality=85)