REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
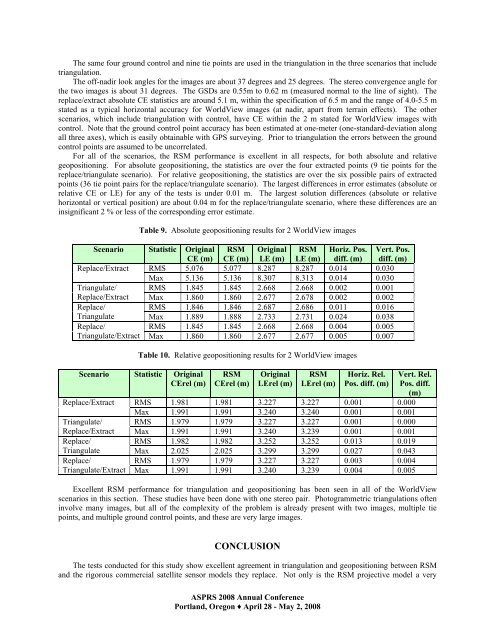
The same four ground control and nine tie points are used in the triangulation in the three scenarios that include<br />
triangulation.<br />
The off-nadir look angles for the images are about 37 degrees and 25 degrees. The stereo convergence angle for<br />
the two images is about 31 degrees. The GSDs are 0.55m to 0.62 m (measured normal to the line of sight). The<br />
replace/extract absolute CE statistics are around 5.1 m, within the specification of 6.5 m and the range of 4.0-5.5 m<br />
stated as a typical horizontal accuracy for WorldView images (at nadir, apart from terrain effects). The other<br />
scenarios, which include triangulation with control, have CE within the 2 m stated for WorldView images with<br />
control. Note that the ground control point accuracy has been estimated at one-meter (one-standard-deviation along<br />
all three axes), which is easily obtainable with GPS surveying. Prior to triangulation the errors between the ground<br />
control points are assumed to be uncorrelated.<br />
For all of the scenarios, the <strong>RSM</strong> performance is excellent in all respects, for both absolute and relative<br />
geopositioning. For absolute geopositioning, the statistics are over the four extracted points (9 tie points for the<br />
replace/triangulate scenario). For relative geopositioning, the statistics are over the six possible pairs of extracted<br />
points (36 tie point pairs for the replace/triangulate scenario). The largest differences in error estimates (absolute or<br />
relative CE or LE) for any of the tests is under 0.01 m. The largest solution differences (absolute or relative<br />
horizontal or vertical position) are about 0.04 m for the replace/triangulate scenario, where these differences are an<br />
insignificant 2 % or less of the corresponding error estimate.<br />
Table 9. Absolute geopositioning results for 2 WorldView images<br />
Scenario Statistic Original <strong>RSM</strong> Original <strong>RSM</strong> Horiz. Pos. Vert. Pos.<br />
CE (m) CE (m) LE (m) LE (m) diff. (m) diff. (m)<br />
Replace/Extract RMS 5.076 5.077 8.287 8.287 0.014 0.030<br />
Max 5.136 5.136 8.307 8.313 0.014 0.030<br />
Triangulate/ RMS 1.845 1.845 2.668 2.668 0.002 0.001<br />
Replace/Extract Max 1.860 1.860 2.677 2.678 0.002 0.002<br />
Replace/<br />
RMS 1.846 1.846 2.687 2.686 0.011 0.016<br />
Triangulate Max 1.889 1.888 2.733 2.731 0.024 0.038<br />
Replace/<br />
RMS 1.845 1.845 2.668 2.668 0.004 0.005<br />
Triangulate/Extract Max 1.860 1.860 2.677 2.677 0.005 0.007<br />
Table 10. Relative geopositioning results for 2 WorldView images<br />
Scenario Statistic Original<br />
CErel (m)<br />
<strong>RSM</strong><br />
CErel (m)<br />
Original<br />
LErel (m)<br />
<strong>RSM</strong><br />
LErel (m)<br />
ASPRS 2008 Annual Conference<br />
Portland, Oregon ♦ April 28 - May 2, 2008<br />
Horiz. Rel.<br />
Pos. diff. (m)<br />
Vert. Rel.<br />
Pos. diff.<br />
(m)<br />
Replace/Extract RMS 1.981 1.981 3.227 3.227 0.001 0.000<br />
Max 1.991 1.991 3.240 3.240 0.001 0.001<br />
Triangulate/ RMS 1.979 1.979 3.227 3.227 0.001 0.000<br />
Replace/Extract Max 1.991 1.991 3.240 3.239 0.001 0.001<br />
Replace/<br />
RMS 1.982 1.982 3.252 3.252 0.013 0.019<br />
Triangulate Max 2.025 2.025 3.299 3.299 0.027 0.043<br />
Replace/<br />
RMS 1.979 1.979 3.227 3.227 0.003 0.004<br />
Triangulate/Extract Max 1.991 1.991 3.240 3.239 0.004 0.005<br />
Excellent <strong>RSM</strong> performance for triangulation and geopositioning has been seen in all of the WorldView<br />
scenarios in this section. These studies have been done with one stereo pair. Photogrammetric triangulations often<br />
involve many images, but all of the complexity of the problem is already present with two images, multiple tie<br />
points, and multiple ground control points, and these are very large images.<br />
CONCLUSION<br />
The tests conducted for this study show excellent agreement in triangulation and geopositioning between <strong>RSM</strong><br />
and the rigorous commercial satellite sensor models they replace. Not only is the <strong>RSM</strong> projective model a very