REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
A more challenging extraction test case was established as follows. In one of the QuickBird image sets there<br />
are 56 images in 7 strips of 8 images each. The overlap of two of the strips is at the reasonably favorable<br />
convergence angle of 30 degrees. Along the overlap many tie points have been measured. The extraction test below<br />
is a 10-point simultaneous extraction that uses 4 adjacent images on the strip. The results of this test are<br />
summarized in Table 7 and Table 8.<br />
Table 7. Absolute geopositioning statistics for simultaneous extraction of 10 points from four QuickBird images<br />
Statistic Original <strong>RSM</strong> Original <strong>RSM</strong> Horiz. Pos. Vert. Pos.<br />
CE (m) CE (m) LE (m) LE (m) diff. (m) diff. (m)<br />
RMS 24.711 24.715 53.956 53.962 0.037 0.118<br />
Max 35.695 35.696 76.020 75.965 0.065 0.269<br />
Table 8. Relative geopositioning statistics for simultaneous extraction of 10 points from four QuickBird images<br />
Statistic Original <strong>RSM</strong> Original <strong>RSM</strong> Horiz. Rel. Vert. Rel.<br />
CErel (m) CErel (m) LErel (m) LErel (m) Pos. diff. (m) Pos. diff. (m)<br />
RMS 31.002 31.001 67.648 67.639 0.053 0.166<br />
Max 50.384 50.365 108.224 108.126 0.115 0.380<br />
The results in Table 7 and Table 8 show that even in a more complex multi-image target extraction the <strong>RSM</strong><br />
performance is a very good approximation to that of the original sensor model. The error estimates (absolute and<br />
relative CE and LE) are virtually indistinguishable, with differences between the two less than 0.1 percent. In terms<br />
of the computed absolute point positions, the largest difference was 0.065 m in horizontal position for one of the<br />
points, which was much less than one percent of CE. Similarly, the largest difference in relative positions was 0.38<br />
m which was much less than one percent of the relative LE.<br />
The excellent agreement in QuickBird target extraction results for <strong>RSM</strong> as compared with the original rigorous<br />
sensor model are typical of what has been seen for other sensors in other studies. We next consider the WorldView<br />
sensor, and additional scenarios that showcase additional capabilities of <strong>RSM</strong>.<br />
GEOPOSITIONING <strong>PERFORMANCE</strong> STUDIES WITH WORLDVIEW<br />
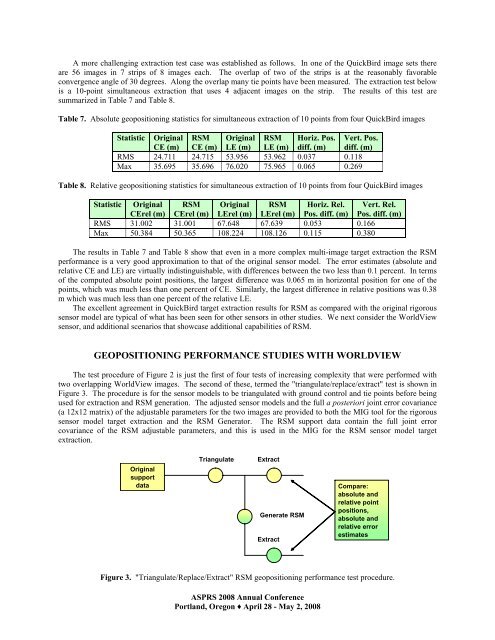
The test procedure of Figure 2 is just the first of four tests of increasing complexity that were performed with<br />
two overlapping WorldView images. The second of these, termed the "triangulate/replace/extract" test is shown in<br />
Figure 3. The procedure is for the sensor models to be triangulated with ground control and tie points before being<br />
used for extraction and <strong>RSM</strong> generation. The adjusted sensor models and the full a posteriori joint error covariance<br />
(a 12x12 matrix) of the adjustable parameters for the two images are provided to both the MIG tool for the rigorous<br />
sensor model target extraction and the <strong>RSM</strong> Generator. The <strong>RSM</strong> support data contain the full joint error<br />
covariance of the <strong>RSM</strong> adjustable parameters, and this is used in the MIG for the <strong>RSM</strong> sensor model target<br />
extraction.<br />
Original<br />
support<br />
data<br />
Triangulate<br />
Extract<br />
Generate <strong>RSM</strong><br />
Extract<br />
ASPRS 2008 Annual Conference<br />
Portland, Oregon ♦ April 28 - May 2, 2008<br />
Compare:<br />
absolute and<br />
relative point<br />
positions,<br />
absolute and<br />
relative error<br />
estimates<br />
Figure 3. "Triangulate/Replace/Extract" <strong>RSM</strong> geopositioning performance test procedure.