REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
covariance mapping (see the following section). These times are for a single Pentium processor running at 1.86<br />
GHz. No effort has been made to optimize the time performance of the <strong>RSM</strong> Generator, which tends to be limited<br />
by the time for the original sensor model projective model calls for the fitting and evaluation points. In addition to<br />
the ground-to-image calls needed to populate the interpolating grid, the 110 coefficients of the baseline polynomial<br />
(55 for row and 55 for column) are calculated by calling the original sensor model image-to-ground function at 1000<br />
fitting points, and the original sensor model image-to-ground function is also called at the 1000 randomly generated<br />
evaluation points.<br />
The polynomial for the baseline projective model is in a single section covering the entire image. The <strong>RSM</strong><br />
Generator automatically divides the interpolating grid into sections as needed in order to be represented within the<br />
<strong>RSM</strong>SD format. For QuickBird a single section was used, and for WorldView about 32 sections were used for each<br />
image.<br />
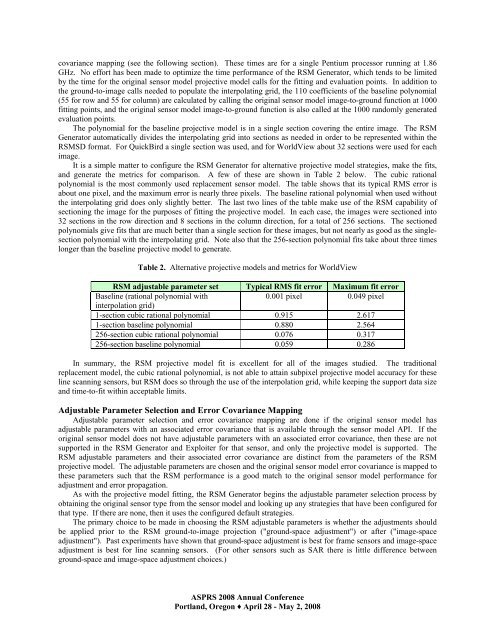
It is a simple matter to configure the <strong>RSM</strong> Generator for alternative projective model strategies, make the fits,<br />
and generate the metrics for comparison. A few of these are shown in Table 2 below. The cubic rational<br />
polynomial is the most commonly used replacement sensor model. The table shows that its typical RMS error is<br />
about one pixel, and the maximum error is nearly three pixels. The baseline rational polynomial when used without<br />
the interpolating grid does only slightly better. The last two lines of the table make use of the <strong>RSM</strong> capability of<br />
sectioning the image for the purposes of fitting the projective model. In each case, the images were sectioned into<br />
32 sections in the row direction and 8 sections in the column direction, for a total of 256 sections. The sectioned<br />
polynomials give fits that are much better than a single section for these images, but not nearly as good as the singlesection<br />
polynomial with the interpolating grid. Note also that the 256-section polynomial fits take about three times<br />
longer than the baseline projective model to generate.<br />
Table 2. Alternative projective models and metrics for WorldView<br />
<strong>RSM</strong> adjustable parameter set Typical RMS fit error Maximum fit error<br />
Baseline (rational polynomial with<br />
interpolation grid)<br />
0.001 pixel 0.049 pixel<br />
1-section cubic rational polynomial 0.915 2.617<br />
1-section baseline polynomial 0.880 2.564<br />
256-section cubic rational polynomial 0.076 0.317<br />
256-section baseline polynomial 0.059 0.286<br />
In summary, the <strong>RSM</strong> projective model fit is excellent for all of the images studied. The traditional<br />
replacement model, the cubic rational polynomial, is not able to attain subpixel projective model accuracy for these<br />
line scanning sensors, but <strong>RSM</strong> does so through the use of the interpolation grid, while keeping the support data size<br />
and time-to-fit within acceptable limits.<br />
Adjustable Parameter Selection and Error Covariance Mapping<br />
Adjustable parameter selection and error covariance mapping are done if the original sensor model has<br />
adjustable parameters with an associated error covariance that is available through the sensor model API. If the<br />
original sensor model does not have adjustable parameters with an associated error covariance, then these are not<br />
supported in the <strong>RSM</strong> Generator and Exploiter for that sensor, and only the projective model is supported. The<br />
<strong>RSM</strong> adjustable parameters and their associated error covariance are distinct from the parameters of the <strong>RSM</strong><br />
projective model. The adjustable parameters are chosen and the original sensor model error covariance is mapped to<br />
these parameters such that the <strong>RSM</strong> performance is a good match to the original sensor model performance for<br />
adjustment and error propagation.<br />
As with the projective model fitting, the <strong>RSM</strong> Generator begins the adjustable parameter selection process by<br />
obtaining the original sensor type from the sensor model and looking up any strategies that have been configured for<br />
that type. If there are none, then it uses the configured default strategies.<br />
The primary choice to be made in choosing the <strong>RSM</strong> adjustable parameters is whether the adjustments should<br />
be applied prior to the <strong>RSM</strong> ground-to-image projection ("ground-space adjustment") or after ("image-space<br />
adjustment"). Past experiments have shown that ground-space adjustment is best for frame sensors and image-space<br />
adjustment is best for line scanning sensors. (For other sensors such as SAR there is little difference between<br />
ground-space and image-space adjustment choices.)<br />
ASPRS 2008 Annual Conference<br />
Portland, Oregon ♦ April 28 - May 2, 2008