REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs
REPLACEMENT SENSOR MODEL (RSM) PERFORMANCE ... - asprs

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
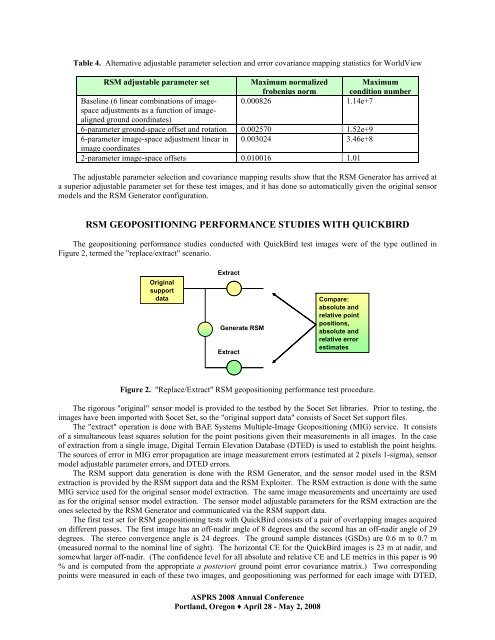
Table 4. Alternative adjustable parameter selection and error covariance mapping statistics for WorldView<br />
<strong>RSM</strong> adjustable parameter set Maximum normalized Maximum<br />
frobenius norm condition number<br />
Baseline (6 linear combinations of imagespace<br />
adjustments as a function of imagealigned<br />
ground coordinates)<br />
0.000826 1.14e+7<br />
6-parameter ground-space offset and rotation 0.002570 1.52e+9<br />
6-parameter image-space adjustment linear in<br />
image coordinates<br />
0.003024 3.46e+8<br />
2-parameter image-space offsets 0.010016 1.01<br />
The adjustable parameter selection and covariance mapping results show that the <strong>RSM</strong> Generator has arrived at<br />
a superior adjustable parameter set for these test images, and it has done so automatically given the original sensor<br />
models and the <strong>RSM</strong> Generator configuration.<br />
<strong>RSM</strong> GEOPOSITIONING <strong>PERFORMANCE</strong> STUDIES WITH QUICKBIRD<br />
The geopositioning performance studies conducted with QuickBird test images were of the type outlined in<br />
Figure 2, termed the "replace/extract" scenario.<br />
Original<br />
support<br />
data<br />
Extract<br />
Generate <strong>RSM</strong><br />
Extract<br />
ASPRS 2008 Annual Conference<br />
Portland, Oregon ♦ April 28 - May 2, 2008<br />
Compare:<br />
absolute and<br />
relative point<br />
positions,<br />
absolute and<br />
relative error<br />
estimates<br />
Figure 2. "Replace/Extract" <strong>RSM</strong> geopositioning performance test procedure.<br />
The rigorous "original" sensor model is provided to the testbed by the Socet Set libraries. Prior to testing, the<br />
images have been imported with Socet Set, so the "original support data" consists of Socet Set support files.<br />
The "extract" operation is done with BAE Systems Multiple-Image Geopositioning (MIG) service. It consists<br />
of a simultaneous least squares solution for the point positions given their measurements in all images. In the case<br />
of extraction from a single image, Digital Terrain Elevation Database (DTED) is used to establish the point heights.<br />
The sources of error in MIG error propagation are image measurement errors (estimated at 2 pixels 1-sigma), sensor<br />
model adjustable parameter errors, and DTED errors.<br />
The <strong>RSM</strong> support data generation is done with the <strong>RSM</strong> Generator, and the sensor model used in the <strong>RSM</strong><br />
extraction is provided by the <strong>RSM</strong> support data and the <strong>RSM</strong> Exploiter. The <strong>RSM</strong> extraction is done with the same<br />
MIG service used for the original sensor model extraction. The same image measurements and uncertainty are used<br />
as for the original sensor model extraction. The sensor model adjustable parameters for the <strong>RSM</strong> extraction are the<br />
ones selected by the <strong>RSM</strong> Generator and communicated via the <strong>RSM</strong> support data.<br />
The first test set for <strong>RSM</strong> geopositioning tests with QuickBird consists of a pair of overlapping images acquired<br />
on different passes. The first image has an off-nadir angle of 8 degrees and the second has an off-nadir angle of 29<br />
degrees. The stereo convergence angle is 24 degrees. The ground sample distances (GSDs) are 0.6 m to 0.7 m<br />
(measured normal to the nominal line of sight). The horizontal CE for the QuickBird images is 23 m at nadir, and<br />
somewhat larger off-nadir. (The confidence level for all absolute and relative CE and LE metrics in this paper is 90<br />
% and is computed from the appropriate a posteriori ground point error covariance matrix.) Two corresponding<br />
points were measured in each of these two images, and geopositioning was performed for each image with DTED,