LR Rabiner and RW Schafer, June 3
LR Rabiner and RW Schafer, June 3
LR Rabiner and RW Schafer, June 3

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
DRAFT: L. R. <strong>Rabiner</strong> <strong>and</strong> R. W. <strong>Schafer</strong>, <strong>June</strong> 3, 2009<br />
8.2. HOMOMORPHIC SYSTEMS FOR CONVOLUTION 435<br />
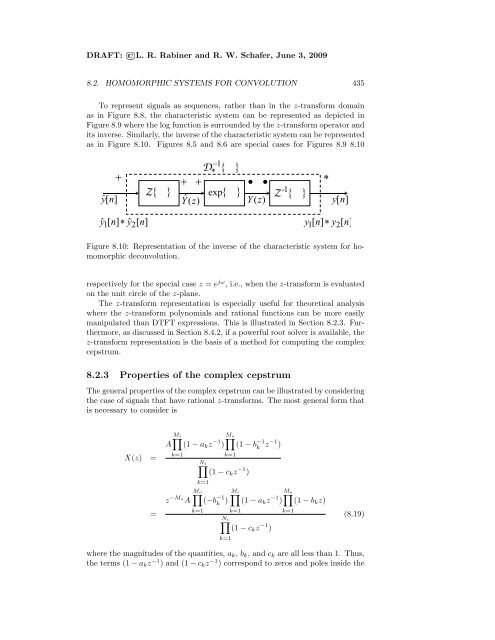
To represent signals as sequences, rather than in the z-transform domain<br />
as in Figure 8.8, the characteristic system can be represented as depicted in<br />
Figure 8.9 where the log function is surrounded by the z-transform operator <strong>and</strong><br />
its inverse. Similarly, the inverse of the characteristic system can be represented<br />
as in Figure 8.10. Figures 8.5 <strong>and</strong> 8.6 are special cases for Figures 8.9 8.10<br />
−1<br />
D∗<br />
{ }<br />
+ + + • • *<br />
Z { } exp{<br />
} -1<br />
yn ˆ[ ]<br />
Yˆ Z { }<br />
( z)<br />
Y( z)<br />
yn [ ]<br />
yˆ 1[<br />
n]<br />
∗ yˆ<br />
2[<br />
n]<br />
y1[ n]<br />
∗ y2[<br />
n]<br />
Figure 8.10: Representation of the inverse of the characteristic system for homomorphic<br />
deconvolution.<br />
respectively for the special case z = e jω , i.e., when the z-transform is evaluated<br />
on the unit circle of the z-plane.<br />
The z-transform representation is especially useful for theoretical analysis<br />
where the z-transform polynomials <strong>and</strong> rational functions can be more easily<br />
manipulated than DTFT expressions. This is illustrated in Section 8.2.3. Furthermore,<br />
as discussed in Section 8.4.2, if a powerful root solver is available, the<br />
z-transform representation is the basis of a method for computing the complex<br />
cepstrum.<br />
8.2.3 Properties of the complex cepstrum<br />
The general properties of the complex cepstrum can be illustrated by considering<br />
the case of signals that have rational z-transforms. The most general form that<br />
is necessary to consider is<br />
X(z) =<br />
=<br />
<br />
Mi<br />
A<br />
k=1<br />
(1 − akz −1 Mo<br />
)<br />
<br />
(1 − b −1<br />
k=1<br />
Ni <br />
(1 − ckz −1 )<br />
k=1<br />
k=1<br />
k=1<br />
k z−1 )<br />
z −Mo Mo <br />
A (−b −1<br />
k )<br />
Mi <br />
(1 − akz −1 Mo <br />
) (1 − bkz)<br />
Ni <br />
(1 − ckz −1 )<br />
k=1<br />
k=1<br />
(8.19)<br />
where the magnitudes of the quantities, ak, bk, <strong>and</strong> ck are all less than 1. Thus,<br />
the terms (1 − akz −1 ) <strong>and</strong> (1 − ckz −1 ) correspond to zeros <strong>and</strong> poles inside the