LR Rabiner and RW Schafer, June 3
LR Rabiner and RW Schafer, June 3
LR Rabiner and RW Schafer, June 3

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
DRAFT: L. R. <strong>Rabiner</strong> <strong>and</strong> R. W. <strong>Schafer</strong>, <strong>June</strong> 3, 2009<br />
8.2. HOMOMORPHIC SYSTEMS FOR CONVOLUTION 429<br />
*<br />
H { }<br />
*<br />
y[ n]<br />
= H { x[<br />
n]<br />
}<br />
x ∗ H { x n]<br />
} ∗H<br />
{ x [ n]<br />
}<br />
x[ n]<br />
1[<br />
n]<br />
x2[<br />
n]<br />
1[<br />
2<br />
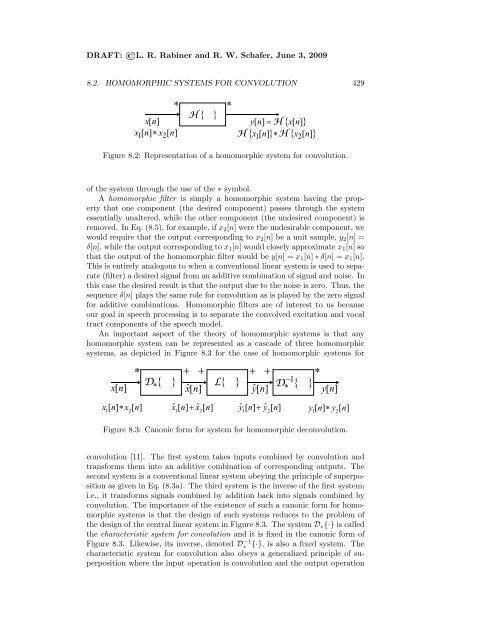
Figure 8.2: Representation of a homomorphic system for convolution.<br />
of the system through the use of the ∗ symbol.<br />
A homomorphic filter is simply a homomorphic system having the property<br />
that one component (the desired component) passes through the system<br />
essentially unaltered, while the other component (the undesired component) is<br />
removed. In Eq. (8.5), for example, if x2[n] were the undesirable component, we<br />
would require that the output corresponding to x2[n] be a unit sample, y2[n] =<br />
δ[n], while the output corresponding to x1[n] would closely approximate x1[n] so<br />
that the output of the homomorphic filter would be y[n] = x1[n] ∗ δ[n] = x1[n].<br />
This is entirely analogous to when a conventional linear system is used to separate<br />
(filter) a desired signal from an additive combination of signal <strong>and</strong> noise. In<br />
this case the desired result is that the output due to the noise is zero. Thus, the<br />
sequence δ[n] plays the same role for convolution as is played by the zero signal<br />
for additive combinations. Homomorphic filters are of interest to us because<br />
our goal in speech processing is to separate the convolved excitation <strong>and</strong> vocal<br />
tract components of the speech model.<br />
An important aspect of the theory of homomorphic systems is that any<br />
homomorphic system can be represented as a cascade of three homomorphic<br />
systems, as depicted in Figure 8.3 for the case of homomorphic systems for<br />
x[ n]<br />
x n x n<br />
* + + + + *<br />
D ∗{<br />
} L{<br />
}<br />
−1<br />
D { }<br />
xn ˆ[ ]<br />
yn ˆ[ ] ∗ yn [ ]<br />
ˆ ˆ<br />
ˆ ˆ<br />
1[ ] ∗ 2[<br />
] x1[ n] + x2[ n]<br />
y1[ n] + y2[ n]<br />
1 ∗ 2<br />
y[ n] y [ n]<br />
Figure 8.3: Canonic form for system for homomorphic deconvolution.<br />
convolution [11]. The first system takes inputs combined by convolution <strong>and</strong><br />
transforms them into an additive combination of corresponding outputs. The<br />
second system is a conventional linear system obeying the principle of superposition<br />
as given in Eq. (8.3a). The third system is the inverse of the first system;<br />
i.e., it transforms signals combined by addition back into signals combined by<br />
convolution. The importance of the existence of such a canonic form for homomorphic<br />
systems is that the design of such systems reduces to the problem of<br />
the design of the central linear system in Figure 8.3. The system D∗{·} is called<br />
the characteristic system for convolution <strong>and</strong> it is fixed in the canonic form of<br />
Figure 8.3. Likewise, its inverse, denoted D −1<br />
∗ {·}, is also a fixed system. The<br />
characteristic system for convolution also obeys a generalized principle of superposition<br />
where the input operation is convolution <strong>and</strong> the output operation