

Boundary-layer height detection with a ceilometer at a coastal ... - Orbit
Boundary-layer height detection with a ceilometer at a coastal ... - Orbit
Boundary-layer height detection with a ceilometer at a coastal ... - Orbit

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
observed and the cloud <strong>layer</strong> and boundary <strong>layer</strong> are turbulently fully coupled then defining<br />
the BLH <strong>at</strong> the top of the cloud may be preferable. When working <strong>with</strong> <strong>ceilometer</strong> d<strong>at</strong>a alone,<br />
it cannot be determined if the two <strong>layer</strong>s are fully coupled and it may be convenient to define<br />
the BLH in another manner than <strong>at</strong> the cloud top.<br />
1600<br />
Zero filter<br />
23/07/2010 22:00<br />
Nearest−neighbour interpol<strong>at</strong>ion<br />
1600<br />
1600<br />
Cloud base filter<br />
1400<br />
1400<br />
1400<br />
1200<br />
1200<br />
1200<br />
1000<br />
1000<br />
1000<br />
Height [m]<br />
800<br />
Height [m]<br />
800<br />
Height [m]<br />
800<br />
600<br />
600<br />
600<br />
400<br />
400<br />
400<br />
200<br />
200<br />
200<br />
0<br />
0 100 200<br />
Backsc<strong>at</strong>ter [1/(10 8 *srad*m)]<br />
0<br />
0 100 200<br />
Backsc<strong>at</strong>ter [1/(10 8 *srad*m)]<br />
0<br />
0 100 200<br />
Backsc<strong>at</strong>ter [1/(10 8 *srad*m)]<br />
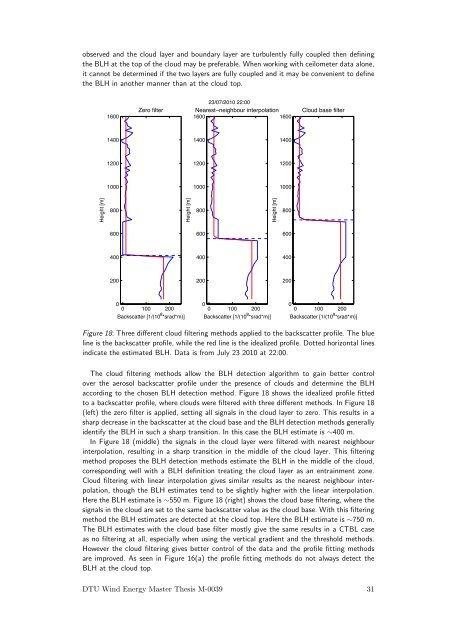
Figure 18: Three different cloud filtering methods applied to the backsc<strong>at</strong>ter profile. The blue<br />
line is the backsc<strong>at</strong>ter profile, while the red line is the idealized profile. Dotted horizontal lines<br />
indic<strong>at</strong>e the estim<strong>at</strong>ed BLH. D<strong>at</strong>a is from July 23 2010 <strong>at</strong> 22:00.<br />
The cloud filtering methods allow the BLH <strong>detection</strong> algorithm to gain better control<br />
over the aerosol backsc<strong>at</strong>ter profile under the presence of clouds and determine the BLH<br />
according to the chosen BLH <strong>detection</strong> method. Figure 18 shows the idealized profile fitted<br />
to a backsc<strong>at</strong>ter profile, where clouds were filtered <strong>with</strong> three different methods. In Figure 18<br />
(left) the zero filter is applied, setting all signals in the cloud <strong>layer</strong> to zero. This results in a<br />
sharp decrease in the backsc<strong>at</strong>ter <strong>at</strong> the cloud base and the BLH <strong>detection</strong> methods generally<br />
identify the BLH in such a sharp transition. In this case the BLH estim<strong>at</strong>e is ∼400 m.<br />
In Figure 18 (middle) the signals in the cloud <strong>layer</strong> were filtered <strong>with</strong> nearest neighbour<br />
interpol<strong>at</strong>ion, resulting in a sharp transition in the middle of the cloud <strong>layer</strong>. This filtering<br />
method proposes the BLH <strong>detection</strong> methods estim<strong>at</strong>e the BLH in the middle of the cloud,<br />
corresponding well <strong>with</strong> a BLH definition tre<strong>at</strong>ing the cloud <strong>layer</strong> as an entrainment zone.<br />
Cloud filtering <strong>with</strong> linear interpol<strong>at</strong>ion gives similar results as the nearest neighbour interpol<strong>at</strong>ion,<br />
though the BLH estim<strong>at</strong>es tend to be slightly higher <strong>with</strong> the linear interpol<strong>at</strong>ion.<br />
Here the BLH estim<strong>at</strong>e is ∼550 m. Figure 18 (right) shows the cloud base filtering, where the<br />
signals in the cloud are set to the same backsc<strong>at</strong>ter value as the cloud base. With this filtering<br />
method the BLH estim<strong>at</strong>es are detected <strong>at</strong> the cloud top. Here the BLH estim<strong>at</strong>e is ∼750 m.<br />
The BLH estim<strong>at</strong>es <strong>with</strong> the cloud base filter mostly give the same results in a CTBL case<br />
as no filtering <strong>at</strong> all, especially when using the vertical gradient and the threshold methods.<br />
However the cloud filtering gives better control of the d<strong>at</strong>a and the profile fitting methods<br />
are improved. As seen in Figure 16(a) the profile fitting methods do not always detect the<br />
BLH <strong>at</strong> the cloud top.<br />
DTU Wind Energy Master Thesis M-0039 31













