

KR QUANTEC press - KUKA Robotics
KR QUANTEC press - KUKA Robotics
KR QUANTEC press - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>KR</strong> <strong>QUANTEC</strong> <strong>press</strong><br />
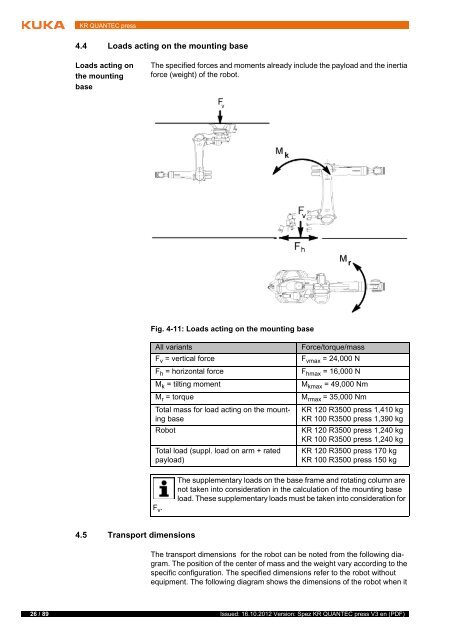
4.4 Loads acting on the mounting base<br />
Loads acting on<br />
the mounting<br />
base<br />
The specified forces and moments already include the payload and the inertia<br />
force (weight) of the robot.<br />
Fig. 4-11: Loads acting on the mounting base<br />
All variants<br />
F v = vertical force<br />
F h = horizontal force<br />
M k = tilting moment<br />
M r = torque<br />
Total mass for load acting on the mounting<br />
base<br />
Robot<br />
Total load (suppl. load on arm + rated<br />
payload)<br />
Force/torque/mass<br />
F vmax = 24,000 N<br />
F hmax = 16,000 N<br />
M kmax = 49,000 Nm<br />
M rmax = 35,000 Nm<br />
<strong>KR</strong> 120 R3500 <strong>press</strong> 1,410 kg<br />
<strong>KR</strong> 100 R3500 <strong>press</strong> 1,390 kg<br />
<strong>KR</strong> 120 R3500 <strong>press</strong> 1,240 kg<br />
<strong>KR</strong> 100 R3500 <strong>press</strong> 1,240 kg<br />
<strong>KR</strong> 120 R3500 <strong>press</strong> 170 kg<br />
<strong>KR</strong> 100 R3500 <strong>press</strong> 150 kg<br />
F v .<br />
The supplementary loads on the base frame and rotating column are<br />
not taken into consideration in the calculation of the mounting base<br />
load. These supplementary loads must be taken into consideration for<br />
4.5 Transport dimensions<br />
The transport dimensions for the robot can be noted from the following diagram.<br />
The position of the center of mass and the weight vary according to the<br />
specific configuration. The specified dimensions refer to the robot without<br />
equipment. The following diagram shows the dimensions of the robot when it<br />
26 / 89 Issued: 16.10.2012 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> <strong>press</strong> V3 en (PDF)














