


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Cauchy’s rigidity theorem 83<br />
Now let n ≥ 4. If for any i ∈ {2, . . ., n − 1} we have α i = α ′ i , then the<br />
q<br />
corresponding vertex can be cut off by introducing the diagonal from q i−1<br />
to q i+1 resp. from q i−1 ′ to q′ i+1 , with q i−1 q i+1 = q′ i−1 q′ i+1 , so we are done<br />
by induction. Thus we may assume α i < α ′ i for 2 ≤ i ≤ n − 1.<br />
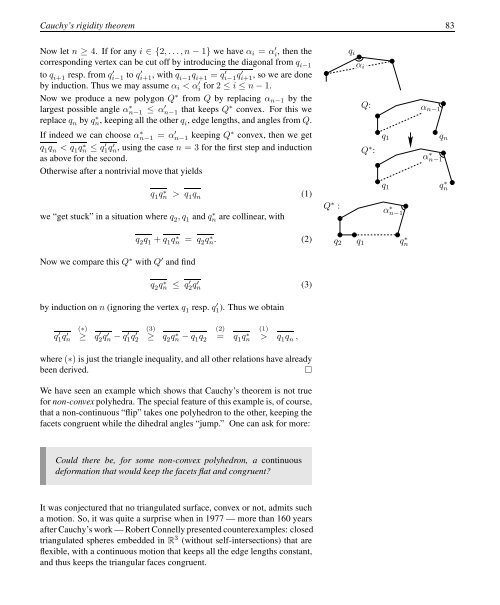
Now we produce a new polygon Q ∗ from Q by replacing α n−1 by the<br />
largest possible angle α ∗ n−1 ≤ α′ n−1 that keeps Q∗ convex. For this we<br />
replace q n by qn, ∗ keeping all the other q i , edge lengths, and angles from Q.<br />
i<br />
α i<br />
Q:<br />
α n−1<br />
If indeed we can choose α ∗ n−1 = α ′ n−1 keeping Q ∗ convex, then we get<br />
q 1 q n < q 1 qn ∗ ≤ q′ 1 q′ n , using the case n = 3 for the first step and induction<br />
as above for the second.<br />
Otherwise after a nontrivial move that yields<br />
Q ∗ :<br />
q 1<br />
α ∗ n−1<br />
q n<br />
q 1 q ∗ n > q 1 q n (1)<br />
we “get stuck” in a situation where q 2 , q 1 and qn ∗ are collinear, with<br />
Q ∗ :<br />
q 1<br />
α ∗ n−1<br />
q ∗ n<br />
q 2 q 1 + q 1 qn ∗ = q 2 q∗ n . (2) q 2<br />
Now we compare this Q ∗ with Q ′ and find<br />
q 2 qn ∗ ≤ q 2 ′ q′ n (3)<br />
by induction on n (ignoring the vertex q 1 resp. q 1 ′ ). Thus we obtain<br />
q 1<br />
q ∗ n<br />
q ′ 1 q′ n<br />
(∗)<br />
≥ q ′ 2 q′ n − q ′ 1 q′ 2<br />
(3)<br />
≥ q 2 qn ∗ (2)<br />
− q 1 q 2 = q 1 qn<br />
∗<br />
(1)<br />
> q 1 q n ,<br />
where (∗) is just the triangle inequality, and all other relations have already<br />
been derived.<br />
□<br />
We have seen an example which shows that Cauchy’s theorem is not true<br />
for non-convex polyhedra. The special feature of this example is, of course,<br />
that a non-continuous “flip” takes one polyhedron to the other, keeping the<br />
facets congruent while the dihedral angles “jump.” One can ask for more:<br />
Could there be, for some non-convex polyhedron, a continuous<br />
deformation that would keep the facets flat and congruent?<br />
It was conjectured that no triangulated surface, convex or not, admits such<br />
a motion. So, it was quite a surprise when in 1977 — more than 160 years<br />
after Cauchy’s work — Robert Connelly presented counterexamples: closed<br />
triangulated spheres embedded in R 3 (without self-intersections) that are<br />
flexible, with a continuous motion that keeps all the edge lengths constant,<br />
and thus keeps the triangular faces congruent.