- Page 3:
Nonlinear Equations
- Page 6 and 7:
Copyright © 2011 by Gregorio Malaj
- Page 9 and 10:
Foreword I added together the ratio
- Page 11 and 12:
ix another book with a systematic p
- Page 13 and 14:
Contents Foreword vii 1 Counting so
- Page 15:
CONTENTS xiii 10 Homotopy 135 10.1
- Page 18 and 19:
2 [CH. 1: COUNTING SOLUTIONS if and
- Page 20 and 21:
4 [CH. 1: COUNTING SOLUTIONS connec
- Page 22 and 23:
6 [CH. 1: COUNTING SOLUTIONS 1.2 Sh
- Page 24 and 25:
8 [CH. 1: COUNTING SOLUTIONS has ex
- Page 26 and 27:
10 [CH. 1: COUNTING SOLUTIONS equat
- Page 28 and 29:
Chapter 2 The Nullstellensatz The s
- Page 30 and 31:
14 [CH. 2: THE NULLSTELLENSATZ prin
- Page 32 and 33:
16 [CH. 2: THE NULLSTELLENSATZ or a
- Page 34 and 35:
18 [CH. 2: THE NULLSTELLENSATZ 3. T
- Page 36 and 37:
20 [CH. 2: THE NULLSTELLENSATZ and
- Page 38 and 39:
22 [CH. 2: THE NULLSTELLENSATZ 1. T
- Page 40 and 41:
24 [CH. 2: THE NULLSTELLENSATZ Proo
- Page 42 and 43:
26 [CH. 2: THE NULLSTELLENSATZ To e
- Page 44 and 45:
28 [CH. 2: THE NULLSTELLENSATZ for
- Page 46 and 47:
30 [CH. 2: THE NULLSTELLENSATZ 2.7
- Page 48 and 49:
32 [CH. 2: THE NULLSTELLENSATZ Coro
- Page 50 and 51:
34 [CH. 3: TOPOLOGY AND ZERO COUNTI
- Page 52 and 53:
36 [CH. 3: TOPOLOGY AND ZERO COUNTI
- Page 54 and 55:
38 [CH. 3: TOPOLOGY AND ZERO COUNTI
- Page 56 and 57:
40 [CH. 3: TOPOLOGY AND ZERO COUNTI
- Page 58 and 59:
Chapter 4 Differential forms Throug
- Page 60 and 61:
44 [CH. 4: DIFFERENTIAL FORMS Prope
- Page 62 and 63:
46 [CH. 4: DIFFERENTIAL FORMS Lemma
- Page 64 and 65:
48 [CH. 4: DIFFERENTIAL FORMS 2. cl
- Page 66 and 67:
50 [CH. 4: DIFFERENTIAL FORMS be me
- Page 68 and 69:
52 [CH. 4: DIFFERENTIAL FORMS Expan
- Page 70 and 71:
54 [CH. 4: DIFFERENTIAL FORMS We co
- Page 72 and 73:
56 [CH. 5: REPRODUCING KERNEL SPACE
- Page 74 and 75:
58 [CH. 5: REPRODUCING KERNEL SPACE
- Page 76 and 77:
60 [CH. 5: REPRODUCING KERNEL SPACE
- Page 78 and 79:
62 [CH. 5: REPRODUCING KERNEL SPACE
- Page 80 and 81:
64 [CH. 5: REPRODUCING KERNEL SPACE
- Page 82 and 83:
66 [CH. 5: REPRODUCING KERNEL SPACE
- Page 84 and 85:
68 [CH. 5: REPRODUCING KERNEL SPACE
- Page 86 and 87:
70 [CH. 5: REPRODUCING KERNEL SPACE
- Page 88 and 89:
Chapter 6 Exponential sums and spar
- Page 90 and 91:
74 [CH. 6: EXPONENTIAL SUMS AND SPA
- Page 92 and 93:
76 [CH. 6: EXPONENTIAL SUMS AND SPA
- Page 94 and 95:
78 [CH. 6: EXPONENTIAL SUMS AND SPA
- Page 96 and 97:
80 [CH. 6: EXPONENTIAL SUMS AND SPA
- Page 98 and 99:
Chapter 7 Newton Iteration and Alph
- Page 100 and 101:
84 [CH. 7: NEWTON ITERATION As long
- Page 102 and 103:
86 [CH. 7: NEWTON ITERATION Proposi
- Page 104 and 105:
88 [CH. 7: NEWTON ITERATION 1 y =
- Page 106 and 107:
90 [CH. 7: NEWTON ITERATION t 1 t 2
- Page 108 and 109:
92 [CH. 7: NEWTON ITERATION The Tay
- Page 110 and 111:
94 [CH. 7: NEWTON ITERATION 2 63 2
- Page 112 and 113:
96 [CH. 7: NEWTON ITERATION Exercis
- Page 114 and 115:
98 [CH. 7: NEWTON ITERATION The con
- Page 116 and 117:
100 [CH. 7: NEWTON ITERATION Let us
- Page 118 and 119:
102 [CH. 7: NEWTON ITERATION Passin
- Page 120 and 121: 104 [CH. 7: NEWTON ITERATION 13−3
- Page 122 and 123: 106 [CH. 7: NEWTON ITERATION Proof.
- Page 124 and 125: 108 [CH. 8: CONDITION NUMBER THEORY
- Page 126 and 127: 110 [CH. 8: CONDITION NUMBER THEORY
- Page 128 and 129: 112 [CH. 8: CONDITION NUMBER THEORY
- Page 130 and 131: 114 [CH. 8: CONDITION NUMBER THEORY
- Page 132 and 133: 116 [CH. 8: CONDITION NUMBER THEORY
- Page 134 and 135: 118 [CH. 8: CONDITION NUMBER THEORY
- Page 136 and 137: 120 [CH. 8: CONDITION NUMBER THEORY
- Page 138 and 139: 122 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 140 and 141: 124 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 142 and 143: 126 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 144 and 145: 128 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 146 and 147: 130 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 148 and 149: 132 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 150 and 151: 134 [CH. 9: THE PSEUDO-NEWTON OPERA
- Page 152 and 153: 136 [CH. 10: HOMOTOPY form for x i+
- Page 154 and 155: 138 [CH. 10: HOMOTOPY Again, f t is
- Page 156 and 157: 140 [CH. 10: HOMOTOPY We will need
- Page 158 and 159: 142 [CH. 10: HOMOTOPY P n+1 x i [N(
- Page 160 and 161: 144 [CH. 10: HOMOTOPY Let d Riem de
- Page 162 and 163: 146 [CH. 10: HOMOTOPY Lemma 10.13.
- Page 164 and 165: 148 [CH. 10: HOMOTOPY above, the se
- Page 166 and 167: 150 [CH. 10: HOMOTOPY Corollary 10.
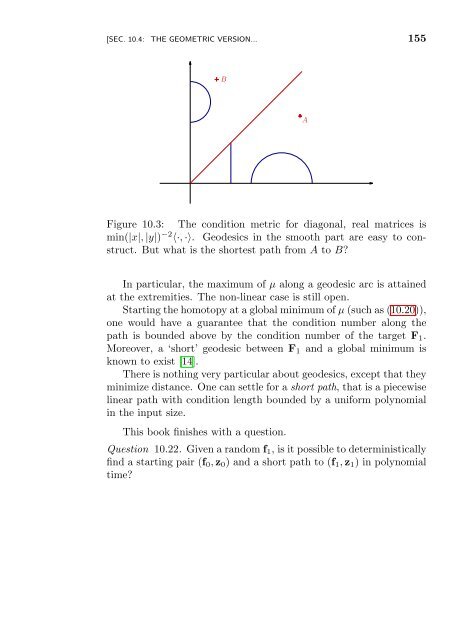
- Page 168 and 169: 152 [CH. 10: HOMOTOPY by the geomet
- Page 173 and 174: Appendix A Open Problems, by Carlos
- Page 175 and 176: [SEC. A.3: EQUIDISTRIBUTION OF ROOT
- Page 177 and 178: [SEC. A.5: EXTENSION OF THE ALGORIT
- Page 179: [SEC. A.7: INTEGER ZEROS OF A POLYN
- Page 182 and 183: 166 BIBLIOGRAPHY [12] , Smale’s 1
- Page 184 and 185: 168 BIBLIOGRAPHY [42] Michael R. Ga
- Page 186 and 187: 170 BIBLIOGRAPHY [69] , Complexity
- Page 189 and 190: Glossary of notations As a general
- Page 191 and 192: Index algorithm discrete, x Homotop
- Page 193: INDEX 177 complexity of homotopy, 1