System Introspection for System Analysis on Mobile Devices
System Introspection for System Analysis on Mobile Devices
System Introspection for System Analysis on Mobile Devices

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
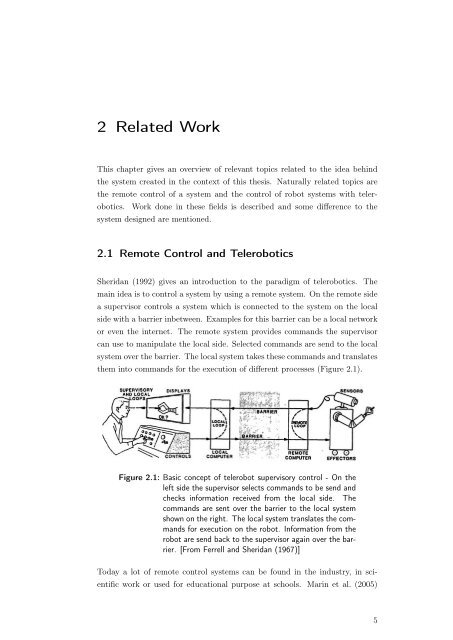
2 Related WorkThis chapter gives an overview of relevant topics related to the idea behindthe system created in the c<strong>on</strong>text of this thesis. Naturally related topics arethe remote c<strong>on</strong>trol of a system and the c<strong>on</strong>trol of robot systems with telerobotics.Work d<strong>on</strong>e in these fields is described and some difference to thesystem designed are menti<strong>on</strong>ed.2.1 Remote C<strong>on</strong>trol and TeleroboticsSheridan (1992) gives an introducti<strong>on</strong> to the paradigm of telerobotics. Themain idea is to c<strong>on</strong>trol a system by using a remote system. On the remote sidea supervisor c<strong>on</strong>trols a system which is c<strong>on</strong>nected to the system <strong>on</strong> the localside with a barrier inbetween. Examples <str<strong>on</strong>g>for</str<strong>on</strong>g> this barrier can be a local networkor even the internet. The remote system provides commands the supervisorcan use to manipulate the local side. Selected commands are send to the localsystem over the barrier. The local system takes these commands and translatesthem into commands <str<strong>on</strong>g>for</str<strong>on</strong>g> the executi<strong>on</strong> of different processes (Figure 2.1).Figure 2.1: Basic c<strong>on</strong>cept of telerobot supervisory c<strong>on</strong>trol - On theleft side the supervisor selects commands to be send andchecks in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong> received from the local side. Thecommands are sent over the barrier to the local systemshown <strong>on</strong> the right. The local system translates the commands<str<strong>on</strong>g>for</str<strong>on</strong>g> executi<strong>on</strong> <strong>on</strong> the robot. In<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong> from therobot are send back to the supervisor again over the barrier.[From Ferrell and Sheridan (1967)]Today a lot of remote c<strong>on</strong>trol systems can be found in the industry, in scientificwork or used <str<strong>on</strong>g>for</str<strong>on</strong>g> educati<strong>on</strong>al purpose at schools. Marin et al. (2005)5