System Introspection for System Analysis on Mobile Devices
System Introspection for System Analysis on Mobile Devices
System Introspection for System Analysis on Mobile Devices

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
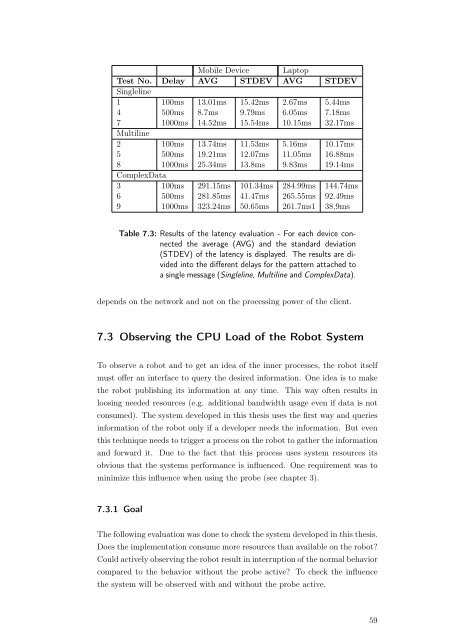
<strong>Mobile</strong> Device LaptopTest No. Delay AVG STDEV AVG STDEVSingleline1 100ms 13.01ms 15.42ms 2.67ms 5.44ms4 500ms 8.7ms 9.79ms 6.05ms 7.18ms7 1000ms 14.52ms 15.54ms 10.15ms 32.17msMultiline2 100ms 13.74ms 11.53ms 5.16ms 10.17ms5 500ms 19.21ms 12.07ms 11.05ms 16.88ms8 1000ms 25.34ms 13.8ms 9.83ms 19.14msComplexData3 100ms 291.15ms 101.34ms 284.99ms 144.74ms6 500ms 281.85ms 41.47ms 265.55ms 92.49ms9 1000ms 323.24ms 50.65ms 261.7ms1 38.9msTable 7.3: Results of the latency evaluati<strong>on</strong> - For each device c<strong>on</strong>nectedthe average (AVG) and the standard deviati<strong>on</strong>(STDEV) of the latency is displayed. The results are dividedinto the different delays <str<strong>on</strong>g>for</str<strong>on</strong>g> the pattern attached toa single message (Singleline, Multiline and ComplexData).depends <strong>on</strong> the network and not <strong>on</strong> the processing power of the client.7.3 Observing the CPU Load of the Robot <str<strong>on</strong>g>System</str<strong>on</strong>g>To observe a robot and to get an idea of the inner processes, the robot itselfmust offer an interface to query the desired in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong>. One idea is to makethe robot publishing its in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong> at any time. This way often results inloosing needed resources (e.g. additi<strong>on</strong>al bandwidth usage even if data is notc<strong>on</strong>sumed). The system developed in this thesis uses the first way and queriesin<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong> of the robot <strong>on</strong>ly if a developer needs the in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong>. But eventhis technique needs to trigger a process <strong>on</strong> the robot to gather the in<str<strong>on</strong>g>for</str<strong>on</strong>g>mati<strong>on</strong>and <str<strong>on</strong>g>for</str<strong>on</strong>g>ward it. Due to the fact that this process uses system resources itsobvious that the systems per<str<strong>on</strong>g>for</str<strong>on</strong>g>mance is influenced. One requirement was tominimize this influence when using the probe (see chapter 3).7.3.1 GoalThe following evaluati<strong>on</strong> was d<strong>on</strong>e to check the system developed in this thesis.Does the implementati<strong>on</strong> c<strong>on</strong>sume more resources than available <strong>on</strong> the robot?Could actively observing the robot result in interrupti<strong>on</strong> of the normal behaviorcompared to the behavior without the probe active? To check the influencethe system will be observed with and without the probe active.59