

Series 2000 Communications Handbook - Soliton
Series 2000 Communications Handbook - Soliton
Series 2000 Communications Handbook - Soliton

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
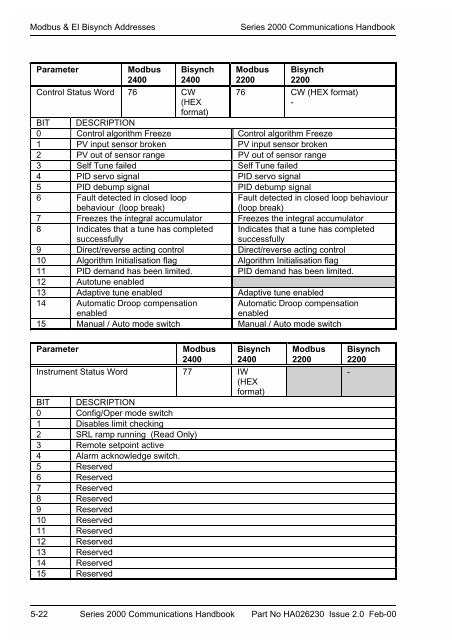
Modbus & EI Bisynch Addresses<strong>Series</strong> <strong>2000</strong> <strong>Communications</strong> <strong>Handbook</strong>ParameterModbus2400Bisynch2400Control Status Word 76 CW(HEXformat)BIT DESCRIPTIONModbus2200Bisynch220076 CW (HEX format)-0 Control algorithm Freeze Control algorithm Freeze1 PV input sensor broken PV input sensor broken2 PV out of sensor range PV out of sensor range3 Self Tune failed Self Tune failed4 PID servo signal PID servo signal5 PID debump signal PID debump signal6 Fault detected in closed loopbehaviour (loop break)Fault detected in closed loop behaviour(loop break)7 Freezes the integral accumulator Freezes the integral accumulator8 Indicates that a tune has completedsuccessfullyIndicates that a tune has completedsuccessfully9 Direct/reverse acting control Direct/reverse acting control10 Algorithm Initialisation flag Algorithm Initialisation flag11 PID demand has been limited. PID demand has been limited.12 Autotune enabled13 Adaptive tune enabled Adaptive tune enabled14 Automatic Droop compensationenabledAutomatic Droop compensationenabled15 Manual / Auto mode switch Manual / Auto mode switchParameterModbus2400Bisynch2400Instrument Status Word 77 IW(HEXformat)BIT DESCRIPTION0 Config/Oper mode switch1 Disables limit checking2 SRL ramp running (Read Only)3 Remote setpoint active4 Alarm acknowledge switch.5 Reserved6 Reserved7 Reserved8 Reserved9 Reserved10 Reserved11 Reserved12 Reserved13 Reserved14 Reserved15 ReservedModbus2200Bisynch2200-5-22 <strong>Series</strong> <strong>2000</strong> <strong>Communications</strong> <strong>Handbook</strong> Part No HA026230 Issue 2.0 Feb-00













