Advances in Ship Helicopter Support Systems Enhancing Mission ...
Advances in Ship Helicopter Support Systems Enhancing Mission ...
Advances in Ship Helicopter Support Systems Enhancing Mission ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
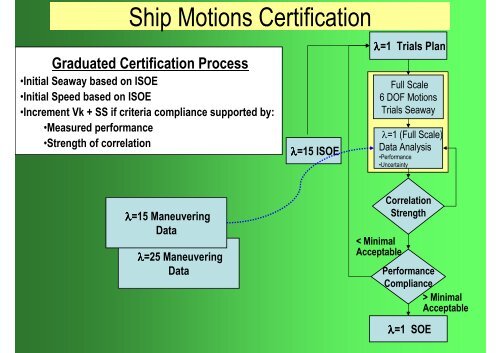
<strong>Ship</strong> Motions Certification<br />
λ=25 Test Plan<br />
λ=25<br />
6 DOF Motions<br />
Trials Seaway<br />
< M<strong>in</strong>imal<br />
Acceptable<br />
λ=25<br />
Data Analysis<br />
•Performance<br />
•Uncerta<strong>in</strong>ty<br />
Performance<br />
Compliance<br />
> M<strong>in</strong>imal<br />
Acceptable<br />
λ=25 ISOE<br />
λ=25 Maneuver<strong>in</strong>g<br />
Data<br />
λ=15 Test Plan<br />
Graduated Certification Process<br />
•Initial Seaway based on ISOE<br />
λ=25<br />
λ=15<br />
•Initial Speed 6 DOF based Motions on ISOE<br />
4 DOF Motions<br />
P-Spec Seaway<br />
P-Spec Seaway<br />
•Increment Vk + SS if criteria compliance supported by:<br />
•Measured performance<br />
•Strength of correlation<br />
λ=15 Maneuver<strong>in</strong>g<br />
Data<br />
λ=15<br />
4 DOF Motions<br />
Trials Seaway<br />
< M<strong>in</strong>imal<br />
Acceptable<br />
λ=15<br />
Data Analysis<br />
•Performance<br />
•Uncerta<strong>in</strong>ty<br />
Correlation<br />
Strength<br />
Performance<br />
Compliance<br />
> M<strong>in</strong>imal<br />
Acceptable<br />
λ=15 ISOE λ=15 ISOE<br />
λ=1 Trials Plan<br />
Full Scale<br />
6 DOF Motions<br />
Trials Seaway<br />
λ=1 (Full Scale)<br />
Data Analysis<br />
•Performance<br />
•Uncerta<strong>in</strong>ty<br />
< M<strong>in</strong>imal<br />
Acceptable<br />
Correlation<br />
Strength<br />
Performance<br />
Compliance<br />
> M<strong>in</strong>imal<br />
Acceptable<br />
λ=1 SOE