

TECHNOLOGY DIGEST - Draper Laboratory
TECHNOLOGY DIGEST - Draper Laboratory
TECHNOLOGY DIGEST - Draper Laboratory

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Y eci (me)<br />
Autonomous Mission Management for Spacecraft Rendezvous Using an Agent Hierarchy<br />
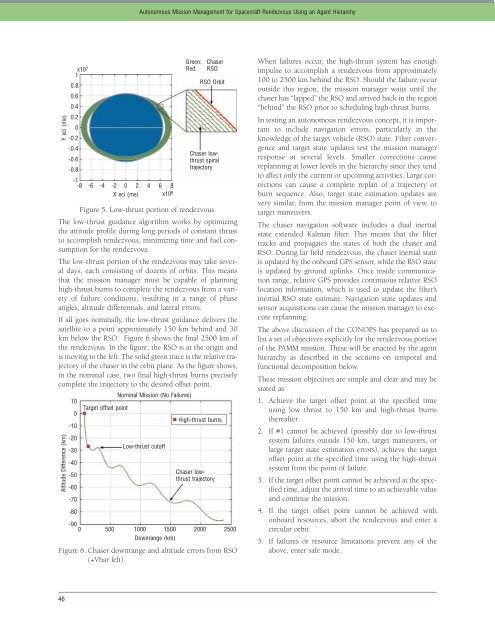
Figure 5. Low-thrust portion of rendezvous.<br />
The low-thrust guidance algorithm works by optimizing<br />
the attitude profile during long periods of constant thrust<br />
to accomplish rendezvous, minimizing time and fuel consumption<br />
for the rendezvous.<br />
The low-thrust portion of the rendezvous may take several<br />
days, each consisting of dozens of orbits. This means<br />
that the mission manager must be capable of planning<br />
high-thrust burns to complete the rendezvous from a variety<br />
of failure conditions, resulting in a range of phase<br />
angles, altitude differentials, and lateral errors.<br />
If all goes nominally, the low-thrust guidance delivers the<br />
satellite to a point approximately 150 km behind and 30<br />
km below the RSO. Figure 6 shows the final 2500 km of<br />
the rendezvous. In the figure, the RSO is at the origin and<br />
is moving to the left. The solid green trace is the relative trajectory<br />
of the chaser in the orbit plane. As the figure shows,<br />
in the nominal case, two final high-thrust burns precisely<br />
complete the trajectory to the desired offset point.<br />
Altitude Difference (km)<br />
Figure 6. Chaser downrange and altitude errors from RSO<br />
(+Vbar left).<br />
46<br />
x107 1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
-0.4<br />
-0.6<br />
-0.8<br />
X eci (me) x106 -1<br />
-8 -6 -4 -2 0 2 4 6 8<br />
10<br />
0<br />
-10<br />
-20<br />
-30<br />
-40<br />
-50<br />
-60<br />
-70<br />
-80<br />
Target offset point<br />
Nominal Mission (No Failures)<br />
Low-thrust cutoff<br />
Downrange (km)<br />
Green: Chaser<br />
Red: RSO<br />
RSO Orbit<br />
Chaser lowthrust<br />
spiral<br />
trajectory<br />
High-thrust burns<br />
Chaser lowthrust<br />
trajectory<br />
-90 0 500 1000 1500 2000 2500<br />
When failures occur, the high-thrust system has enough<br />
impulse to accomplish a rendezvous from approximately<br />
100 to 2500 km behind the RSO. Should the failure occur<br />
outside this region, the mission manager waits until the<br />
chaser has “lapped” the RSO and arrived back in the region<br />
“behind” the RSO prior to scheduling high-thrust burns.<br />
In testing an autonomous rendezvous concept, it is important<br />
to include navigation errors, particularly in the<br />
knowledge of the target vehicle (RSO) state. Filter convergence<br />
and target state updates test the mission manager<br />
response at several levels. Smaller corrections cause<br />
replanning at lower levels in the hierarchy since they tend<br />
to affect only the current or upcoming activities. Large corrections<br />
can cause a complete replan of a trajectory or<br />
burn sequence. Also, target state estimation updates are<br />
very similar, from the mission manager point of view, to<br />
target maneuvers.<br />
The chaser navigation software includes a dual inertial<br />
state extended Kalman filter. This means that the filter<br />
tracks and propagates the states of both the chaser and<br />
RSO. During far field rendezvous, the chaser inertial state<br />
is updated by the onboard GPS sensor, while the RSO state<br />
is updated by ground uplinks. Once inside communication<br />
range, relative GPS provides continuous relative RSO<br />
location information, which is used to update the filter’s<br />
inertial RSO state estimate. Navigation state updates and<br />
sensor acquisitions can cause the mission manager to execute<br />
replanning.<br />
The above discussion of the CONOPS has prepared us to<br />
list a set of objectives explicitly for the rendezvous portion<br />
of the PAMM mission. These will be enacted by the agent<br />
hierarchy as described in the sections on temporal and<br />
functional decomposition below.<br />
These mission objectives are simple and clear and may be<br />
stated as:<br />
1. Achieve the target offset point at the specified time<br />
using low thrust to 150 km and high-thrust burns<br />
thereafter.<br />
2. If #1 cannot be achieved (possibly due to low-thrust<br />
system failures outside 150 km, target maneuvers, or<br />
large target state estimation errors), achieve the target<br />
offset point at the specified time using the high-thrust<br />
system from the point of failure.<br />
3. If the target offset point cannot be achieved at the specified<br />
time, adjust the arrival time to an achievable value<br />
and continue the mission.<br />
4. If the target offset point cannot be achieved with<br />
onboard resources, abort the rendezvous and enter a<br />
circular orbit.<br />
5. If failures or resource limitations prevent any of the<br />
above, enter safe mode.














