El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Introduction<br />
<strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong><br />
Recordatorio V.V.E.E<br />
Análisis <strong>de</strong> sistemas en V.V.E.E<br />
Diseño <strong>de</strong> Observadores <strong>de</strong> Estado<br />
Ejemplos:<br />
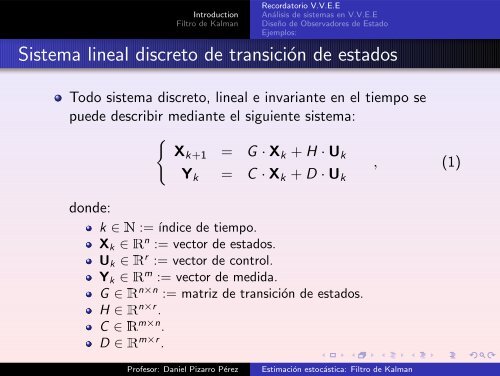
Sistema lineal discreto <strong>de</strong> transición <strong>de</strong> estados<br />
Todo sistema discreto, lineal e invariante en el tiempo se<br />
pue<strong>de</strong> <strong>de</strong>scribir mediante el siguiente sistema:<br />
{<br />
X k+1 = G · X k + H · U k<br />
, (1)<br />
Y k = C · X k + D · U k<br />
don<strong>de</strong>:<br />
k ∈ Æ := índice <strong>de</strong> tiempo.<br />
X k ∈ Ê n := vector <strong>de</strong> estados.<br />
U k ∈ Ê r := vector <strong>de</strong> control.<br />
Y k ∈ Ê m := vector <strong>de</strong> medida.<br />
G ∈ Ê n×n := matriz <strong>de</strong> transición <strong>de</strong> estados.<br />
H ∈ Ê n×r .<br />
C ∈ Ê m×n .<br />
D ∈ Ê m×r .<br />
Profesor: Daniel Pizarro Pérez<br />
Estimación estocástica: <strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong>