El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Introduction<br />
<strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong><br />
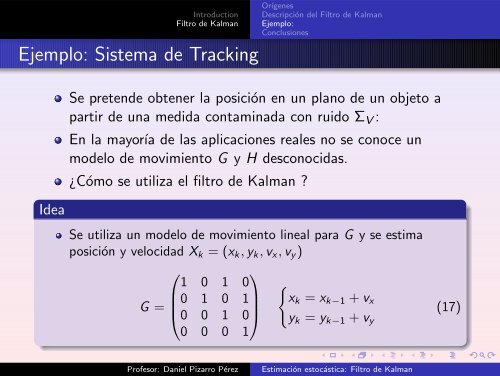
Ejemplo: Sistema <strong>de</strong> Tracking<br />
Orígenes<br />
Descripción <strong>de</strong>l <strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong><br />
Ejemplo:<br />
Conclusiones<br />
I<strong>de</strong>a<br />
Se preten<strong>de</strong> obtener la posición en un plano <strong>de</strong> un objeto a<br />
partir <strong>de</strong> una medida contaminada con ruido Σ V :<br />
En la mayoría <strong>de</strong> las aplicaciones reales no se conoce un<br />
mo<strong>de</strong>lo <strong>de</strong> movimiento G y H <strong>de</strong>sconocidas.<br />
¿Cómo se utiliza el filtro <strong>de</strong> <strong>Kalman</strong> ?<br />
Se utiliza un mo<strong>de</strong>lo <strong>de</strong> movimiento lineal para G y se estima<br />
posición y velocidad X k = (x k ,y k ,v x ,v y )<br />
⎛ ⎞<br />
1 0 1 0<br />
G = ⎜0 1 0 1<br />
⎟<br />
⎝0 0 1 0⎠<br />
0 0 0 1<br />
{<br />
x k = x k−1 + v x<br />
y k = y k−1 + v y<br />
(17)<br />
Profesor: Daniel Pizarro Pérez<br />
Estimación estocástica: <strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong>