El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...
El Filtro de Kalman - Departamento de Electrónica - Universidad de ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Introduction<br />
<strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong><br />
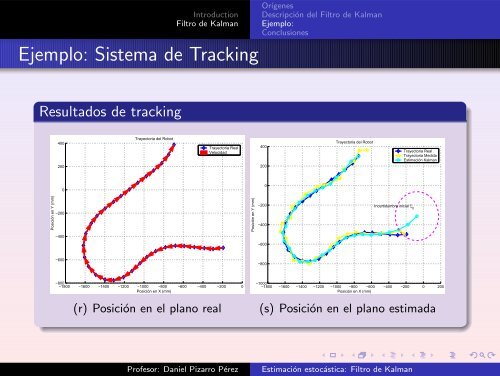
Ejemplo: Sistema <strong>de</strong> Tracking<br />
Orígenes<br />
Descripción <strong>de</strong>l <strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong><br />
Ejemplo:<br />
Conclusiones<br />
Resultados <strong>de</strong> tracking<br />
400<br />
Trayectoria <strong>de</strong>l Robot<br />
Trayectoria Real<br />
Velocidad<br />
400<br />
Trayectoria <strong>de</strong>l Robot<br />
Trayectoria Real<br />
Trayectoria Medida<br />
Estimación <strong>Kalman</strong><br />
200<br />
200<br />
0<br />
0<br />
Posición en Y (mm)<br />
−200<br />
Posición en Y (mm)<br />
−200<br />
−400<br />
Incertidumbre inicial Σ 0<br />
−400<br />
−600<br />
−600<br />
−800<br />
−800<br />
−1800 −1600 −1400 −1200 −1000 −800 −600 −400 −200 0<br />
Posición en X (mm)<br />
(r) Posición en el plano real<br />
−1000<br />
−1800 −1600 −1400 −1200 −1000 −800 −600 −400 −200 0 200<br />
Posición en X (mm)<br />
(s) Posición en el plano estimada<br />
Profesor: Daniel Pizarro Pérez<br />
Estimación estocástica: <strong>Filtro</strong> <strong>de</strong> <strong>Kalman</strong>