Télécharger la thèse - EDF R&D
Télécharger la thèse - EDF R&D
Télécharger la thèse - EDF R&D

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.1 Modèles de matériaux dissipatifs 12<br />
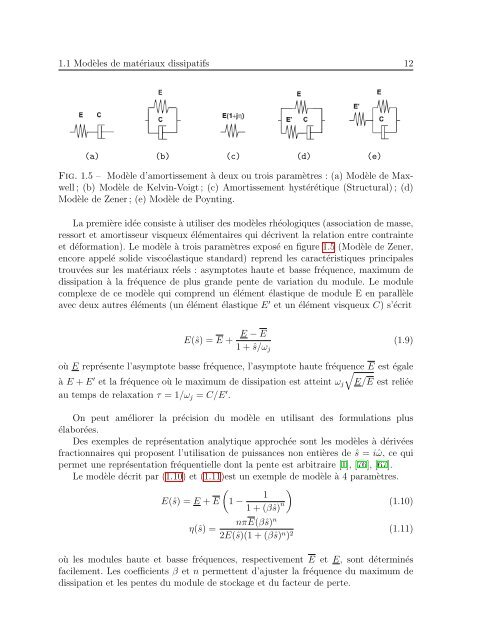
(a) (b) (c) (d) (e)<br />
Fig. 1.5 – Modèle d’amortissement à deux ou trois paramètres : (a) Modèle de Maxwell<br />
; (b) Modèle de Kelvin-Voigt ; (c) Amortissement hystérétique (Structural) ; (d)<br />
Modèle de Zener ; (e) Modèle de Poynting.<br />
La première idée consiste à utiliser des modèles rhéologiques (association de masse,<br />
ressort et amortisseur visqueux élémentaires qui décrivent <strong>la</strong> re<strong>la</strong>tion entre contrainte<br />
et déformation). Le modèle à trois paramètres exposé en figure 1.5 (Modèle de Zener,<br />
encore appelé solide viscoé<strong>la</strong>stique standard) reprend les caractéristiques principales<br />
trouvées sur les matériaux réels : asymptotes haute et basse fréquence, maximum de<br />
dissipation à <strong>la</strong> fréquence de plus grande pente de variation du module. Le module<br />
complexe de ce modèle qui comprend un élément é<strong>la</strong>stique de module E en parallèle<br />
avec deux autres éléments (un élément é<strong>la</strong>stique E ′ et un élément visqueux C) s’écrit<br />
E(ŝ) = E + E − E<br />
1 + ŝ/ω j<br />
(1.9)<br />
où E représente l’asymptote basse fréquence, l’asymptote haute fréquence E est égale<br />
à E + E ′ et <strong>la</strong> fréquence où le maximum de dissipation est atteint ω j<br />
√E/E est reliée<br />
au temps de re<strong>la</strong>xation τ = 1/ω j = C/E ′ .<br />
On peut améliorer <strong>la</strong> précision du modèle en utilisant des formu<strong>la</strong>tions plus<br />
é<strong>la</strong>borées.<br />
Des exemples de représentation analytique approchée sont les modèles à dérivées<br />
fractionnaires qui proposent l’utilisation de puissances non entières de ŝ = iˆω, ce qui<br />
permet une représentation fréquentielle dont <strong>la</strong> pente est arbitraire [1], [76], [67].<br />
Le modèle décrit par (1.10) et (1.11)est un exemple de modèle à 4 paramètres.<br />
E(ŝ) = E + E<br />
η(ŝ) =<br />
(<br />
1 −<br />
)<br />
1<br />
1 + (βŝ) n<br />
(1.10)<br />
nπE(βŝ) n<br />
2E(ŝ)(1 + (βŝ) n ) 2 (1.11)<br />
où les modules haute et basse fréquences, respectivement E et E, sont déterminés<br />
facilement. Les coefficients β et n permettent d’ajuster <strong>la</strong> fréquence du maximum de<br />
dissipation et les pentes du module de stockage et du facteur de perte.


![[pastel-00803187, v1] Détermination du rôle de l'énergie ... - EDF R&D](https://img.yumpu.com/51129317/1/184x260/pastel-00803187-v1-determination-du-role-de-lenergie-edf-rd.jpg?quality=85)