2. hét: Az alakváltozás fogalma, kis és nagy alakváltozások ...
2. hét: Az alakváltozás fogalma, kis és nagy alakváltozások ...
2. hét: Az alakváltozás fogalma, kis és nagy alakváltozások ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
<strong>2.</strong> <strong>hét</strong>: <strong>Az</strong> <strong>alakváltozás</strong> <strong>fogalma</strong>, <strong>kis</strong> <strong>és</strong> <strong>nagy</strong> <strong>alakváltozás</strong>ok,<br />
<strong>alakváltozás</strong>-tenzorok, főnyúlások<br />
1. 1D <strong>alakváltozás</strong>ok vizsgálata<br />
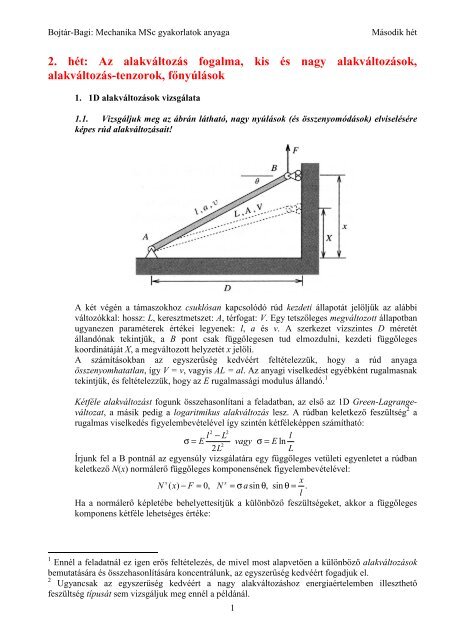
1.1. Vizsgáljuk meg az ábrán látható, <strong>nagy</strong> nyúlások (<strong>és</strong> összenyomódások) elvisel<strong>és</strong>ére<br />
képes rúd <strong>alakváltozás</strong>ait!<br />
A két végén a támaszokhoz csuklósan kapcsolódó rúd kezdeti állapotát jelöljük az alábbi<br />
változókkal: hossz: L, keresztmetszet: A, térfogat: V. Egy tetszőleges megváltozott állapotban<br />
ugyanezen paraméterek értékei legyenek: l, a <strong>és</strong> v. A szerkezet vízszintes D méretét<br />
állandónak tekintjük, a B pont csak függőlegesen tud elmozdulni, kezdeti függőleges<br />
koordinátáját X, a megváltozott helyzetét x jelöli.<br />
A számításokban az egyszerűség kedvéért feltételezzük, hogy a rúd anyaga<br />
összenyomhatatlan, így V = v, vagyis AL = al. <strong>Az</strong> anyagi viselked<strong>és</strong>t egyébként rugalmasnak<br />
tekintjük, <strong>és</strong> feltételezzük, hogy az E rugalmassági modulus állandó. 1<br />
Kétféle <strong>alakváltozás</strong>t fogunk összehasonlítani a feladatban, az első az 1D Green-Lagrangeváltozat,<br />
a másik pedig a logaritmikus <strong>alakváltozás</strong> lesz. A rúdban keletkező feszültség 2 a<br />
rugalmas viselked<strong>és</strong> figyelembevételével így szintén kétféleképpen számítható:<br />
2 2<br />
l − L l<br />
σ = E vagy σ = E ln<br />
2<br />
2L<br />
L<br />
Írjunk fel a B pontnál az egyensúly vizsgálatára egy függőleges vetületi egyenletet a rúdban<br />
keletkező N(x) normálerő függőleges komponensének figyelembevételével:<br />
N ( x) − F = 0, N = σ asin<br />
θ, sin θ = .<br />
l<br />
Ha a normálerő képletébe behelyettesítjük a különböző feszültségeket, akkor a függőleges<br />
komponens kétféle lehetséges értéke:<br />
x x x<br />
1 Ennél a feladatnál ez igen erős feltételez<strong>és</strong>, de mivel most alapvetően a különböző <strong>alakváltozás</strong>ok<br />
bemutatására <strong>és</strong> összehasonlítására koncentrálunk, az egyszerűség kedvéért fogadjuk el.<br />
2 Ugyancsak az egyszerűség kedvéért a <strong>nagy</strong> <strong>alakváltozás</strong>hoz energiaértelemben illeszthető<br />
feszültség típusát sem vizsgáljuk meg ennél a példánál.<br />
1
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
2 2<br />
x Evx ⎛ l − L ⎞<br />
x Evx l<br />
N = vagy N ln<br />
2 ⎜ 2 ⎟ = .<br />
2<br />
l ⎝ 2L<br />
⎠<br />
l L<br />
2 2 2<br />
Megjegyezzük, hogy mivel l = D + x , így a normálerő x nemlineáris függvénye lesz.<br />
Ha az F külső erő egy megadott értékéhez akarjuk <strong>kis</strong>zámítani az egyensúlyi állapotnak<br />
megfelelő x koordináta <strong>nagy</strong>ságát, akkor a fenti nemlineáris egyenleteket kell megoldanunk.<br />
Term<strong>és</strong>zetesen sokkal egyszerűbb a fordított feladat: adott x értékéhez <strong>kis</strong>zámítani a<br />
szükséges F <strong>nagy</strong>ságát, ezért a továbbiakban ezt a gondolatmenetet követjük.<br />
45 fokos kezdeti állapot esetére megoldva ezt a feladatot egy ábrán feltüntettük a kétféle<br />
<strong>alakváltozás</strong>hoz tartozó (EA-val illetve L-lel normált) F – x kapcsolatot:<br />
A következő ábrán egy olyan rudat vizsgáltunk, amelynek kezdeti helyzete függőleges volt:<br />
2<br />
Logaritmikus<br />
Logaritmikus
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A példához tartozó utolsó ábra egy vízszintes kezdeti állapotú rúdelem állapotváltozását<br />
mutatja:<br />
Befejez<strong>és</strong>ül még megjegyezzük, hogy a B csomópontnál végrehajtott egyensúlyi vizsgálatból<br />
egyszerű <strong>és</strong> érdekes következtet<strong>és</strong> vonható le a szerkezet függőleges merevségének<br />
vizsgálatára. Jelöljük például a vetületi egyenletben szereplő két tag különbségét az alábbi<br />
módon R(x)-szel:<br />
x<br />
R( x) = N ( x) − F .<br />
Ez a változó zérus értékű az egyensúly teljesül<strong>és</strong>e esetén, változása pedig a rendszer<br />
függőleges irányú ellenállását, merevségét jelzi. Ha F állandó, akkor:<br />
x<br />
dR dN d ⎛ σVx ⎞ ⎛ ax dσ 2σax<br />
⎞ dl σa<br />
K = = = ⎜ 2 ⎟ = ⎜ − 2 ⎟ + =<br />
dx dx dx ⎝ l ⎠ ⎝ l dl l ⎠ dx l<br />
2<br />
⎛ dσ 2σ<br />
⎞ x σa<br />
a ⎜ ⎟ 2<br />
dl l l l<br />
=<br />
⎝<br />
−<br />
⎠<br />
+ .<br />
A képlethez még szükséges dσ / dl deriváltat az egyes <strong>alakváltozás</strong>ok segítségével lehet<br />
felírni. Jelen esetben:<br />
2 vagy<br />
⎛ dσ ⎞<br />
⎜ ⎟<br />
⎝ dl ⎠GL El<br />
=<br />
L<br />
⎛ dσ ⎞<br />
⎜ ⎟<br />
⎝ dl ⎠Log<br />
E<br />
= ,<br />
l<br />
így a kétféle merevség:<br />
2 2<br />
A ⎛ L ⎞ x σa KGL = ⎜ E − 2σ 2 ⎟ + 2<br />
L ⎝ l ⎠ l l<br />
vagy<br />
2<br />
a x σa<br />
K Log = ( E − 2σ<br />
) + .<br />
2<br />
l l l<br />
Sok hasonló elem fedezhető fel a képletekben, de (ahogy azt az előző ábrákon is láthattuk)<br />
értékük a különböző <strong>alakváltozás</strong>-modellek miatt nem azonos, csupán a kezdeti X<br />
konfigurációhoz <strong>nagy</strong>on közeli x esetén (ahol a ≈ A, l ≈ L ) mondhatjuk, hogy KGL ≈ KLog<br />
.<br />
1.<strong>2.</strong> Bizonyítsuk be, hogy 1D esetben a térfogatváltozásra jellemző J determináns<br />
kifejezhető a λ nyúlási- <strong>és</strong> a ν Poisson-tényező segítségével!<br />
A rúd keresztmetszete az egyszerűség kedvéért legyen kör. Egy tetszőleges pillanatnyi<br />
állapot adatai:<br />
2<br />
sugár: r, hossz: l, keresztmetszet: a = r π, térfogat: v = al .<br />
A változásokat növekményi szinten vizsgálva:<br />
3<br />
Logaritmikus
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
<strong>alakváltozás</strong> a hossztengely irányában:<br />
térfogatváltozás: d v = a dl + l da .<br />
dl<br />
ε = , <strong>alakváltozás</strong> sugár irányban: r<br />
l<br />
4<br />
dr dl<br />
r l<br />
ε = = −ν ,<br />
Mivel a terület növekménye<br />
dr dl<br />
da = 2π r dr = 2a = −2aν , így a térfogatváltozás:<br />
r l<br />
d v = a dl − 2aν dl = 1− 2ν<br />
a dl .<br />
( )<br />
d v dl<br />
Innen: = ( 1− 2ν<br />
) . Ha feltételezzük, hogy a Poisson-tényező konstans a deformáció<br />
v l<br />
során, akkor a kezdeti <strong>és</strong> a pillanatnyi állapot között integrálva:<br />
v<br />
l<br />
d v dl v<br />
l<br />
∫ = (1− 2 ν) ln (1 2 )ln<br />
v ∫ ⇒ = − ν .<br />
l V L<br />
Innen:<br />
V L<br />
(1−2 ν)<br />
v ⎛ l ⎞<br />
= J = ⎜ ⎟ = λ<br />
V ⎝ L ⎠<br />
(1−2 ν)<br />
<strong>2.</strong> Többdimenziós <strong>alakváltozás</strong>ok vizsgálata<br />
<strong>2.</strong>1. Egy kör alakra hajlított lemezcsíkon mutassuk be a Green-Lagrange- <strong>és</strong> az<br />
Almansi-Hamel-féle <strong>alakváltozás</strong>i tenzorok számításának lép<strong>és</strong>eit!<br />
Ez a feladat átmenetet képez a korábban vizsgált 1D <strong>és</strong> az „igazi” többdimenziós<br />
<strong>alakváltozás</strong>-állapotok között, hiszen a – sík <strong>alakváltozás</strong>i állapotúnak feltételezett – lemez a<br />
kétdimenziós térben végez elmozdulást, de – mint látni fogjuk – <strong>alakváltozás</strong>ai a szerkezet<br />
jellegéből adódóan egydimenziósak.<br />
Megváltozott állapot<br />
<strong>Az</strong> eredetileg egyenes tengelyű, L hosszúságú elemet az ábrán látható módon körré<br />
hajlítottuk úgy, hogy a kör sugara R = L / π értékű legyen (vagyis a lemez tengely irányú<br />
hossza ne változzon). <strong>Az</strong> elem vastagsága t, az egyes metszetek állapotjellemzőinek<br />
leírásához pedig még egy külön h lokális koordinátát is bevezettünk.<br />
a./ Írjuk fel először a Lagrange-koordinátákat a sugár, a vastagságot jellemző h lokális-,<br />
valamint egy ϕ polárkoordináta segítségével (lásd a jelöl<strong>és</strong>eket a következő ábrán is):<br />
.<br />
Eredeti állapot<br />
A-A metszet
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
X = R ϕ , Y = R + h<br />
Eredeti állapot<br />
A polárszög értéke <strong>és</strong> trigonometrikus függvénye a fentiek alapján:<br />
X<br />
ϕ = , innen:<br />
R<br />
X X<br />
sin ϕ = sin , cos ϕ = cos .<br />
R R<br />
A megváltozott állapotot jellemző Euler-koordináták is számíthatók az ábra alapján:<br />
x = R + h sin ϕ , y = R + h cos ϕ .<br />
( ) ( )<br />
A két koordinátarendszer elemeinek összekapcsolása:<br />
X X<br />
x = Y sin , y = Y cos .<br />
R R<br />
Egy tetszőleges pont eltolódásainak számítása 3 az előadáson tanultak alapján:<br />
X x<br />
u = x − X = Y sin − X , v = y − Y = Y cos − Y .<br />
R R<br />
<strong>Az</strong> eltolódások első deriváltjai:<br />
∂u Y X ∂u<br />
X<br />
= cos − 1, = sin ,<br />
∂X R R ∂Y<br />
R<br />
∂v Y X ∂v<br />
X<br />
= − sin , = cos −1.<br />
∂X R R ∂Y<br />
R<br />
A Green-Lagrange-tenzor síkbeli esethez tartozó komponensei a behelyettesít<strong>és</strong> után:<br />
( ) 2<br />
2 2 2<br />
∂u 1 ⎡⎛ ∂u ⎞ ⎛ ∂v<br />
⎞ ⎤ 1 ⎛ R + h ⎞ h 1 ⎛ h ⎞<br />
EXX<br />
= + ⎢⎜ ⎟ + ⎜ ⎟ ⎥ = ⎜ − 1+<br />
⎟ = +<br />
2<br />
⎜ ⎟<br />
∂X 2 ⎢ X X 2 ⎜ R ⎟<br />
⎣⎝ ∂ ⎠ ⎝ ∂ ⎠ ⎥⎦<br />
R 2 R<br />
⎝ ⎠ ⎝ ⎠<br />
2 2<br />
∂v 1 ⎡⎛ ∂u ⎞ ⎛ ∂v ⎞ ⎤<br />
1 ⎛ ∂u ∂v ∂u ∂u ∂v ∂v<br />
⎞<br />
EY Y = + ⎢⎜ ⎟ + ⎜ ⎟ ⎥ = 0, EX<br />
Y = ⎜ + + + ⎟ = 0.<br />
∂Y 2 ⎢⎣ ⎝ ∂Y ⎠ ⎝ ∂Y ⎠ ⎥⎦<br />
2 ⎝ ∂Y ∂X ∂X ∂Y ∂X ∂Y<br />
⎠<br />
E <strong>alakváltozás</strong>-komponens különbözik zérustól.<br />
A számítás azt mutatja, hogy kizárólag az X X<br />
Ennek értéke konstans a hossz mentén, zérus a középfelületen, továbbá <strong>nagy</strong>sága egy adott<br />
pont esetében alapvetően a középfelülettől mért távolságtól függ.<br />
Megjegyezzük, hogy ennél a feladatnál az az érdekes helyzet fordult elő, hogy az eredményül<br />
kapott <strong>alakváltozás</strong> viszonylag nem túl <strong>nagy</strong>, hiszen a vastagság lényegesen <strong>kis</strong>ebb, mint a<br />
sugár, de a számítás során kapott egyes komponensek viszont külön-külön igen jelentősek is<br />
3 Jelen esetben w = 0, hiszen síkbeli feladatot vizsgálunk.<br />
5<br />
Megváltozott állapot
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
∂u ∂v<br />
lehetnek. Például a középsíknál (Y = R esetén) számított első deriváltak közül <strong>és</strong><br />
∂X ∂ Y<br />
nulla <strong>és</strong> -2 (!) között változhat, de a másik két derivált is igen <strong>nagy</strong> lehet: u ∂<br />
nulla <strong>és</strong> egy,<br />
∂ Y<br />
∂v<br />
pedig nulla <strong>és</strong> -1 közötti változhat.<br />
∂X<br />
Fontos emlékeztetnünk arra, hogy a Green-Lagrange-tenzor elemei közvetlenül nem<br />
használhatók fel a megváltozott hosszak számítására, hiszen eredetileg hossznégyzetek<br />
különbségének jellemz<strong>és</strong>ére alkották meg őket, némi átalakítással azonban a „valódi”<br />
hosszváltozás is meghatározható belőlük. Például ebben az „egydimenziós” feladatban (az<br />
egyszerűség kedvéért indexek nélküli változókat használva) a Green-Lagrange-<strong>alakváltozás</strong><br />
az eredeti definíció alapján (itt l az új, l 0 pedig az eredeti hossza egy egydimenziós elemnek):<br />
l − l<br />
E = .<br />
2 2<br />
0<br />
2<br />
2l0<br />
Ha (tetszőleges értékű nyúlásra) egy „hagyományos” mérnöki <strong>alakváltozás</strong>t<br />
l − l0<br />
ε =<br />
l0<br />
módon definiálunk, akkor az első képletből kifejezett l értéket a másikba helyettesítve a<br />
következőt kapjuk:<br />
ε = 2E + 1 − 1.<br />
Ennek segítségével már meghatározható az új hosszúság a kezdeti érték felhasználásával:<br />
l = l 1+ ε = l 2E + 1 .<br />
( )<br />
0 0<br />
Nézzünk ennek bemutatására egy numerikus példát az előbbi, hajlított lemezcsíkra kapott<br />
eredmények felhasználásával. Legyen például L = 30 cm, R = L / π = 9,549297cm<br />
, a<br />
vastagság pedig: t = 2 mm. Számítsuk ki a Green-Lagrange-tenzor felhasználásával a<br />
„külső”, domború felületr<strong>és</strong>zhez (h = +1 mm) tartozó új hosszúságot. Maga a GL<strong>alakváltozás</strong><br />
az adott numerikus értékekkel:<br />
2<br />
h 1 ⎛ h ⎞<br />
EXX<br />
= + ⎜ ⎟<br />
R 2 ⎝ R ⎠<br />
A mérnöki <strong>alakváltozás</strong>:<br />
1 1 ⎛ 1 ⎞<br />
= +<br />
95,49297 2<br />
⎜<br />
95, 49297<br />
⎟<br />
⎝ ⎠<br />
= 1,05268 ⋅10<br />
ε =<br />
A külső felület új hossza:<br />
−2<br />
2E + 1 − 1 = 1,0472 ⋅ 10 .<br />
l = L 1+ ε = L 2E + 1 = 303,14159 mm .<br />
( )<br />
Ez az érték könnyen ellenőrizhető, hiszen π -vel elosztott értékének egyeznie kell az eredeti<br />
sugár +h-val megnövelt <strong>nagy</strong>ságával:<br />
l<br />
= 96, 49297 mm<br />
π<br />
vagyis a számítás helyes volt.<br />
⇔ R + h = 96,49297 mm ,<br />
b./ Számítsuk ki most az Almansi-Hamel-féle <strong>alakváltozás</strong>tenzort! <strong>Az</strong> előadáson tanult<br />
definíció az Euler-koordináták segítségével:<br />
1 1<br />
1 ⎛ u<br />
−T − ∂u ∂ i j ∂uk ∂u<br />
⎞<br />
k<br />
e = ⎡I -F F , vagyindexes jelöl<strong>és</strong>sel : ei<br />
j<br />
2 ⎣<br />
⋅ ⎤<br />
⎦<br />
= ⎜ + − ⎟ .<br />
2 ⎜ ∂x j ∂x i ∂x i ∂x<br />
⎟<br />
⎝ j ⎠<br />
6<br />
2<br />
−2<br />
.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A tenzor meghatározáshoz először a Lagrange-koordinátákat kell kifejeznünk az Eulerváltozók<br />
segítségével:<br />
x<br />
X = R ϕ = R arctg ,<br />
y<br />
<strong>Az</strong> elmozdulások Euler-koordinátákkal:<br />
Y = R + h =<br />
2 2<br />
x + y .<br />
x<br />
u = x − X = x − R arctg ,<br />
y<br />
v = y − Y = y −<br />
2 2<br />
x + y .<br />
A következő lép<strong>és</strong> a derivált függvények számítása:<br />
∂ u<br />
= 1− R<br />
∂ x 1 +<br />
1 1 Ry<br />
= 1− 2 2 2<br />
x / y y x + y<br />
Ry<br />
= 1 − , 2<br />
( R + h)<br />
( )<br />
∂ u 1 ⎛ 1 ⎞ Rx Rx<br />
= −R x⎜<br />
− ⎟ = =<br />
∂ y 1 + / ⎝ y ⎠ x + y ( R + h)<br />
( x y)<br />
2 2 2 2 2<br />
∂ v 2x<br />
x ∂ v 2y<br />
y<br />
= − = − , = 1− = 1 − .<br />
∂ x 2 2<br />
2 x + y R + h ∂ y 2 2<br />
2 x + y R + h<br />
A tenzor elemi r<strong>és</strong>zletesen:<br />
2 2 2 2<br />
∂u 1 ⎡⎛ ∂u ⎞ ⎛ ∂v<br />
⎞ ⎤ 1 ⎡ 1 ⎛ R y 2 ⎞⎤<br />
ex x = − ⎢⎜ ⎟ + ⎜ ⎟ ⎥ = ⎢1 − x ,<br />
2 ⎜ + 2 ⎟⎥<br />
∂x 2 ⎣⎢ ⎝ ∂x ⎠ ⎝ ∂ x ⎠ ⎦⎥<br />
2 ⎣ ( R + h) ⎝ ( R + h)<br />
⎠⎦<br />
2 2<br />
2 2<br />
∂v 1 ⎡⎛ ∂u ⎞ ⎛ ∂v<br />
⎞ ⎤ 1 ⎡ 1 ⎛ R x 2 ⎞⎤<br />
ey y = − ⎢⎜ ⎟ + ⎜ ⎟ ⎥ = ⎢1 − y ,<br />
2 ⎜ + 2 ⎟⎥<br />
∂y 2 ⎢⎣ ⎝ ∂y ⎠ ⎝ ∂ y ⎠ ⎥⎦<br />
2 ⎣ ( R + h) ⎝ ( R + h)<br />
⎠⎦<br />
2<br />
1 ⎡∂u ∂v ⎛ ∂u ∂u ∂v ∂v<br />
⎞⎤<br />
xy ⎛ R ⎞<br />
ex<br />
y = ⎢ + − ⎜ + ⎟⎥<br />
= 1 .<br />
2 ⎜ − 2 ⎟<br />
2 ⎣ ∂y ∂x ⎝ ∂x ∂y ∂x ∂ y ⎠⎦ 2( R + h) ⎝ ( R + h)<br />
⎠<br />
Ezek az <strong>alakváltozás</strong>-komponensek a középfelületen szintén zérus értékűek 4 .<br />
Befejez<strong>és</strong>ül hasonlítsuk össze a lemez egy középső metszetében lévő pontnál a kétféle<br />
<strong>alakváltozás</strong>tenzort! A sugár <strong>és</strong> a lokális koordináta: R = 100 mm, h = 1 mm.<br />
A koordináták a kétféle rendszer szerint:<br />
x = R + h, <strong>Az</strong> <strong>alakváltozás</strong>-tenzorok:<br />
y = 0 ⇔ X = R π / 2, Y = R + h .<br />
( ) 2<br />
1 ⎡ R + h ⎤<br />
EXX = ⎢− 1+ 0,01005, 2 ⎥ =<br />
2 ⎢⎣ R ⎥⎦<br />
EY Y = 0, EX<br />
Y = 0,<br />
2<br />
1 ⎡ R ⎤<br />
e x x = 0, e y y = ⎢1− 0,00985, e 0.<br />
2 ⎥ = x y =<br />
2 ⎣ ( R + h)<br />
⎦<br />
<strong>Az</strong> <strong>alakváltozás</strong>-tenzorok elemeinek értelmez<strong>és</strong>ét segíti a következő ábra:<br />
4 Megjegyezzük, hogy az AH-tenzor használata esetén is megteremthető az 1D mérnöki<br />
1<br />
2 2 ε (1 + ε )<br />
l −l0<br />
<strong>alakváltozás</strong>sal a kapcsolat: e = = 2 .<br />
2 2 2<br />
2 l (1 + ε<br />
)<br />
7<br />
,
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
e yy e yx<br />
RAJZOLÓ: ε HELYETT e − t!!!!<br />
e<br />
xy<br />
e xx<br />
<strong>2.</strong><strong>2.</strong> Hivatkozva az első gyakorlat <strong>2.</strong>1-es példájára, számítsuk ki a kétdimenziós jobb <strong>és</strong><br />
bal Cauchy-Green-tenzorokat!<br />
Emlékeztetőül a <strong>2.</strong>1-es példához tartozó ábra:<br />
Mivel az ottani példában már <strong>kis</strong>zámítottuk<br />
a gradiens-tenzort:<br />
1 ⎡2 F =<br />
2<br />
⎢<br />
⎣0 3⎤<br />
3<br />
⎥<br />
⎦ ,<br />
a két keresett tenzor egyszerűen számítható<br />
a hozzájuk tartozó definícióból. A jobb<br />
Cauchy-Green-tenzor:<br />
C =<br />
1 ⎡ T 2<br />
F F = ⎢<br />
2 ⎢<br />
⎣3 3⎤<br />
⎥ .<br />
9⎥<br />
⎦<br />
A másik keresett deformációs-tenzor, a bal Cauchy-Green (vagy Finger-féle) változat:<br />
T 1 ⎡13 b = F F =<br />
4<br />
⎢<br />
⎣ 9<br />
9⎤<br />
.<br />
9<br />
⎥<br />
⎦<br />
Megjegyezzük, hogy ezen tenzorok segítségével egy adott feladatnál egyszerűen számíthatók<br />
a Green-Lagrange- <strong>és</strong> az Almansi-Hamel-féle <strong>alakváltozás</strong>tenzorok is:<br />
1 1 0<br />
E ( C I )<br />
2 4 3<br />
3 1 1 1 0<br />
, e ( I b )<br />
7 2 18 9<br />
9<br />
.<br />
4<br />
−<br />
⎡<br />
= − = ⎢<br />
⎣<br />
⎤ ⎡<br />
⎥ = − = ⎢<br />
⎦ ⎣<br />
⎤<br />
−<br />
⎥<br />
⎦<br />
A <strong>2.</strong>1-es példában már meghatározott<br />
1 ⎡2 e2 = F E 2 =<br />
2<br />
⎢<br />
⎣0 3⎤ ⎡0⎤ ⎡1,5 ⎤<br />
=<br />
3<br />
⎥ ⎢<br />
1<br />
⎥ ⎢<br />
1,5<br />
⎥<br />
⎦ ⎣ ⎦ ⎣ ⎦ vektor<br />
hossznégyzetének vizsgálatára például felhasználhatjuk a GL-tenzort. <strong>Az</strong> eredeti definíció<br />
alapján (figyelembe véve, hogy az új hossz<br />
vizsgálatánál a következőt kapjuk:<br />
4,5 , az eredeti pedig 1) ennek a vektornak a<br />
2 2<br />
1 ⎛ l − L ⎞ 7<br />
EGL,<br />
e = 2 ⎜ 2 ⎟ = .<br />
2 ⎝ L ⎠ 4<br />
8
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
Használjuk most a GL-tenzort ugyanennek a számításnak a végrehajtására (ilyenkor az e2 -t<br />
az eredeti Lagrange-rendszerben adott koordinátáival, vagyis egy ott egységvektorként adott<br />
változóként kell figyelembe vennünk):<br />
T<br />
1 ⎡0 3⎤ ⎡0⎤ 7<br />
EGL, e = E [ ]<br />
2 2 EE 2 = 0 1<br />
4<br />
⎢<br />
3 7<br />
⎥ ⎢ =<br />
1<br />
⎥ .<br />
⎣ ⎦ ⎣ ⎦ 4<br />
A számítás „fordított” sorrendben is elvégezhető. Ugyanennek a vektornak az Eulerrendszerből<br />
a Lagrange-rendszerbe történő transzformálásánál a hossznégyzet változása:<br />
2 2<br />
1 ⎛ l − L ⎞ 7<br />
eAH<br />
, e = 2 ⎜ 2 ⎟ =<br />
2 ⎝ l ⎠ 18<br />
módon számítható, ami szintén egyezik az Almansi-Hamel-féle tenzorral történő<br />
transzformációval:<br />
⎡ 1 ⎤<br />
T ⎡ 1 1 ⎤ 1 ⎡0 9 ⎤ ⎢ ⎥<br />
7<br />
eAH , e = e<br />
2 2 ee2<br />
= ⎢ ⎥<br />
2 2 18<br />
⎢ ⎢ ⎥ =<br />
9 4<br />
⎥ .<br />
⎣ ⎦ ⎣ − ⎦ ⎢ 1 ⎥ 18<br />
⎢<br />
⎣ 2<br />
⎥<br />
⎦<br />
3. <strong>Az</strong> <strong>alakváltozás</strong>-sebesség tenzor (D)<br />
3.1. Számítsuk ki az AH-tenzor anyagi idő szerinti deriváltját az <strong>alakváltozás</strong>-sebesség<br />
tenzor segítségével!<br />
A tenzor számítása az eredeti definíció alapján:<br />
1 −T −1<br />
e = ⎡ ⋅ ⎤<br />
2 ⎣<br />
I -F F<br />
⎦<br />
.<br />
<strong>Az</strong> anyagi idő szerinti derivált ennek figyelembevételével:<br />
1 D −T −1 1 ⎛ D −T −1 −T D −1<br />
⎞<br />
eɺ = − ( F ⋅ F ) = − ⎜ ( F ) ⋅ F + F ⋅ ( F ) ⎟ .<br />
2 Dt 2 ⎝ Dt Dt ⎠<br />
Figyelembe véve, hogy a sebesség-gradiens tenzor az alábbi módon számítható (lásd a<br />
második <strong>hét</strong> előadásvázlatát):<br />
1<br />
L F F −<br />
= ɺ ⋅ ,<br />
az előbbi egyenletben szereplő deriváltak az alábbiak lesznek:<br />
D −1 −1 −1 −1 −1<br />
( F ) = − F Fɺ F = −F L ⇐F<br />
F= I azonosságból kiindulva, láncszabállyal ,<br />
Dt<br />
D −T −T D T −T T −T −T<br />
T<br />
( F ) = − F ( F ) F = −L F ⇐ F F = I azonosságból kiindulva, láncszabállyal .<br />
Dt Dt<br />
Helyettesítsük vissza ezeket a deriváltakat az AH-tenzor deriváltjának képletébe, így ott most<br />
már megjelenik a sebesség-gradiens tenzor szimmetrikus r<strong>és</strong>zét jelentő <strong>alakváltozás</strong>-sebesség<br />
tenzor:<br />
1 T −T −1 −T −1<br />
1 T T<br />
eɺ = − ( −L F F − F F L) = ⎡ ( − 2 ) + ( − 2 ⎤ = − −<br />
2 2 ⎣<br />
L I e I e)L<br />
⎦<br />
D L e eL .<br />
4. <strong>Az</strong> F gradienstenzor szorzat alakú (poláris) felbontása<br />
Emlékeztetőül a poláris felbontás alapvető képletei:<br />
F = R U ,<br />
U = F F R = F U<br />
⋅ ahol ( ) 1<br />
9<br />
T 2 -1<br />
⋅ , ⋅<br />
.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A poláris felbontás mechanikai értelmez<strong>és</strong>ét illusztrálja a következő ábra, ahol a felbontás<br />
elméletileg lehetséges, másik sorrendű változatát is feltüntettük (ezt most nem fogjuk<br />
használni):<br />
Eredeti helyzet<br />
Emlékeztetőül megjegyezzük, hogy egy mátrix négyzetgyökének <strong>kis</strong>zámításához az alábbi<br />
lép<strong>és</strong>ek szükségesek:<br />
T<br />
a./ Határozzuk meg az F ⋅ F mátrix sajátértékeit <strong>és</strong> sajátvektorait.<br />
b./ A λ i sajátértékeknek vegyük a négyzetgyökét s helyezzük el őket egy diagonál mátrixba:<br />
H = λ1 , λ 2 , λ 3 .<br />
c./ A sajátvektorokat oszloponként helyezzük el egy A mátrixba.<br />
T T<br />
U = F ⋅F = A ⋅H ⋅ A .<br />
d./ A nyúlási tenzor ezek segítségével: ( ) 1<br />
2<br />
4.1. <strong>Az</strong> alábbi kétdimenziós feladatban adottak a mozgásegyenletek. Határozzuk meg a<br />
gradienstenzort <strong>és</strong> poláris felbontását a t = 1 időpillanatban az X = 0 helyen!<br />
<strong>Az</strong> Euler- <strong>és</strong> Lagrange-koordináták közötti változást leíró egyenletek az idő függvényében:<br />
1 1<br />
x = ( 4X + ( 9 − 3X − 5 Y − XY ) t) , y = ( 4Y + ( 16 + 8X<br />
) t)<br />
.<br />
4 4<br />
A gradiens-tenzor:<br />
⎡ ∂x ⎢∂X F = ⎢<br />
⎢ ∂y ⎢⎣ ∂X ∂x<br />
⎤<br />
∂Y<br />
⎥ 1 ⎡1 ⎥ =<br />
∂y 4<br />
⎢<br />
⎥ ⎣8 ∂Y<br />
⎥⎦<br />
−5⎤<br />
4<br />
⎥ .<br />
⎦<br />
T<br />
<strong>Az</strong> F ⋅F szorzat:<br />
1 ⎡65 16<br />
⎢<br />
⎣27 27⎤ ⎡4,0625 41<br />
⎥ = ⎢<br />
⎦ ⎣1,6875 1,6875 ⎤<br />
2,5625<br />
⎥<br />
⎦ .<br />
A karakterisztikus egyenlet <strong>és</strong> a sajátértékek:<br />
4,0625 − λ<br />
1,6875<br />
1,6875<br />
2<br />
= 0 ⇒ λ − 6,625λ + 7,5623 = 0 ⇒ λ 1 = 5,1592,<br />
2,5625 − λ<br />
λ 2 = 1,4658 .<br />
10<br />
Deformálódott állapot
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A sajátértékek négyzetgyökéből alkotott diagonálmátrix:<br />
⎡2,2714 0 ⎤<br />
H = ⎢<br />
0 1, 2107<br />
⎥<br />
⎣ ⎦ .<br />
A sajátvektorok meghatározása következik (csak az első vektorra mutatjuk be a számítás<br />
r<strong>és</strong>zleteit, a másiknál teljesen hasonlóak a lép<strong>és</strong>ek). A szükséges egyenletek (a<br />
sajátértékfeladat első egyenletébe visszahelyettesített első sajátérték felhasználásával illetve<br />
az iránykoszinuszok négyzetösszegére vonatkozó feltételből):<br />
2 2<br />
(4,0625 − 5,1592) n + 1,6875 n = 0, n + n = 1.<br />
T<br />
<strong>Az</strong> első sajátvektor: [ ]<br />
1x 1y 1x 1y<br />
a 1 = 0,8385 0,5449 .<br />
T<br />
A második sajátvektor: a 2 = [ − 0,5449<br />
⎡0,8385 0,8385]<br />
. <strong>Az</strong> A tenzor: A = ⎢<br />
⎣0,5449 −0,5449⎤<br />
0,8385<br />
⎥<br />
⎦ .<br />
T ⎡1,9564 <strong>Az</strong> U nyúlási tenzor: U = A ⋅ H ⋅ A = U = ⎢<br />
⎣0,4846 0,4846⎤<br />
1,5257<br />
⎥ .<br />
⎦<br />
Utolsó lép<strong>és</strong>ként az R rotációs tenzor meghatározása következik:<br />
-1<br />
1 ⎡1 R = F⋅ U = R =<br />
4<br />
⎢<br />
⎣8 −5⎤ 1 ⎡ 1,5257<br />
4<br />
⎥<br />
2,75<br />
⎢<br />
⎦ ⎣−0, 4846<br />
−0,4846⎤ ⎡0,3590 =<br />
1,9564<br />
⎥ ⎢<br />
⎦ ⎣0,9333 −0,9333⎤<br />
0,3590<br />
⎥<br />
⎦ .<br />
<strong>Az</strong> eredmények ellenőrz<strong>és</strong>ét a triviálisan adódó RU szorzat mellett másképpen is<br />
végrehajthatjuk, például úgy, hogy egyúttal megmutatjuk az egyes komponensek fizikai<br />
tartalmát.<br />
Transzformáljuk például a sajátvektorokat az anyagi térből az Euler-rendszerbe a gradienstenzor<br />
segítségével:<br />
E 1 ⎡1 −5⎤ ⎡0,8385⎤ ⎡−0,4715⎤ E 1 ⎡1 −5⎤ ⎡−0,5449⎤ ⎡ −1,1843<br />
⎤<br />
a1 = F a1 = , a2 F a2<br />
.<br />
4<br />
⎢<br />
8 4<br />
⎥ ⎢<br />
0,5449<br />
⎥ = ⎢ = = =<br />
2,2219<br />
⎥<br />
4<br />
⎢<br />
8 4<br />
⎥ ⎢<br />
0,8385<br />
⎥ ⎢<br />
−0,2513<br />
⎥<br />
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦<br />
<strong>Az</strong> új vektorok term<strong>és</strong>zetesen most is merőlegesek egymásra, skalár szorzatuk zérus. Állítsuk<br />
elő ugyanezt a transzformációt a poláris szorzat segítségével. Első lép<strong>és</strong>ként szorozzuk be a<br />
két eredeti sajátvektort a sajátértékekből adódó, nyújtást jellemző értékkel:<br />
⎡0,8385⎤ ⎡1,9046 ⎤ ⎡ −0,5449 ⎤ ⎡−0,6597 ⎤<br />
λ 1 a1 = 2, 2714 ⎢ , 2 a2<br />
2,2714 ,<br />
0,5449<br />
⎥ = ⎢ λ = =<br />
1,2377<br />
⎥ ⎢<br />
0,8385<br />
⎥ ⎢<br />
1,0152<br />
⎥<br />
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦<br />
majd ezeket a vektorokat a rotációs tenzor segítségével transzformáljuk az Euler-rendszerbe:<br />
E<br />
⎡0,3590 −0,9333⎤ ⎡1,9046⎤ ⎡−0,4715 ⎤<br />
a1 = R λ 1 a1<br />
= ⎢ ,<br />
0,9333 0,3590<br />
⎥ ⎢<br />
1, 2377<br />
⎥ = ⎢<br />
2, 2219<br />
⎥<br />
⎣ ⎦ ⎣ ⎦ ⎣ ⎦<br />
E<br />
⎡0,3590 −0,9333⎤ ⎡−0,6597⎤ ⎡ −1,1843<br />
⎤<br />
a2 = R λ 2 a2<br />
= ⎢ .<br />
0,9333 0,3590<br />
⎥ ⎢ =<br />
1,0152<br />
⎥ ⎢<br />
−0,2513<br />
⎥<br />
⎣ ⎦ ⎣ ⎦ ⎣ ⎦<br />
<strong>Az</strong> eredmények megegyeznek az F tenzor használatával kapott korábbi transzformációval,<br />
tehát a poláris felbontás helyes volt.<br />
5. Főnyúlások számítása<br />
5.1. Egy homogén térbeli <strong>alakváltozás</strong>i állapotú testnél határozzuk meg a főnyúlások <strong>és</strong><br />
a hozzájuk tartozó főirányok értékeit!<br />
<strong>Az</strong> ábrán látható testnél a terhel<strong>és</strong> előtti méreteket tüntettük fel. Feltételezzük, hogy az<br />
<strong>alakváltozás</strong>i állapot az eg<strong>és</strong>z testben homogén, <strong>és</strong> az alábbi GL-tenzor jellemzi:<br />
11
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
⎡−3,72000 −2,57801 −3,89094⎤<br />
E =<br />
⎢<br />
8,04615 1,01118<br />
⎥<br />
⎢<br />
−<br />
⎥<br />
10<br />
⎢⎣ szimm.<br />
4,67385 ⎥⎦<br />
<strong>Az</strong> előadáson láttuk, hogy az <strong>alakváltozás</strong>-tenzorok hoz tartozó sajátértékfeladat<br />
karakterisztikus egyenletének alakja a következő 5 3 2<br />
: − λ + I′ λ − I′ λ + I′<br />
= .<br />
12<br />
−3<br />
.<br />
1 2 3 0<br />
<strong>Az</strong> együtthatók az <strong>alakváltozás</strong>-tenzor invariánsai (az egyszerűség kedvéért kiemeljük a<br />
3<br />
10 − értékű tagot):<br />
I′ = E + E + E = − 3,72000 + 8,04615 + 4,67385 = 9,00000,<br />
I<br />
1 11 22 33<br />
E E E E E E<br />
8,04615 −1,01118 −3,72000 −3,89094<br />
22 23 11 13 11 12<br />
′ 2 = + + = + +<br />
E32 E 33 E 31 E33 E21 E 22 −1,01118 4,67385 −3,89094<br />
4,67385<br />
−3,72000 −2,57801<br />
+ = − 32,51994,<br />
−2,57801<br />
8,04615<br />
I<br />
′3<br />
−3,72000 −2,57801 −3,89094<br />
= 8,04615 − 1,01118 = − 309, 25556<strong>2.</strong><br />
szimm.<br />
4,67385<br />
Behelyettesítve a karakterisztikus egyenletbe:<br />
3 2<br />
− λ + 9λ + 32,51994λ − 309, 25562= 0 .<br />
A harmadfokú egyenlet megoldásából (Cardano-képlet, Newton-Raphson-módszer, stb.) az<br />
3<br />
alábbi három gyököt kapjuk (visszaírjuk 10 − -at):<br />
−3 −3 −3<br />
λ = E = 8,6 ⋅10 , λ = E = 6, 2⋅10 , λ = E = −5,8 ⋅ 10 .<br />
1 1 2 2 3 3<br />
5<br />
Megjegyezzük, hogy az <strong>alakváltozás</strong>i tenzor invariánsait szokás vesszős felső indexszel ellátni,<br />
megkülönböztet<strong>és</strong>ül a feszültségi tenzor invariánsaitól, amelyek vessző nélküliek. Ennek a jelöl<strong>és</strong>i<br />
módnak elsősorban anyagmodelleknél van jelentősége, ahol előfordul mindkét változórendszer<br />
együttes alkalmazása.<br />
Egy másik megjegyz<strong>és</strong> arra vonatkozik, hogy sok könyv, cikk, stb. a fenti karakterisztikus<br />
3 2<br />
egyenletnek –1-gyel megszorzott alakját használja ( 1 2 3 0<br />
λ − I′ λ + I′ λ − I′<br />
= ). Ennek a végeredmény<br />
szempontjából term<strong>és</strong>zetesen nincs jelentősége.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
Ezek a gyökök a tenzor sajátértékei, mechanikai tartalmukat tekintve ezek a GL-tenzorhoz<br />
tartozó főnyúlások.<br />
A főirányok számítása a sajátvektorok meghatározását jelenti. <strong>Az</strong> első sajátvektor számítását<br />
a sajátértékfeladat első két egyenletének, illetve az egységvektorok iránykoszinuszaira<br />
vonatkozó összefügg<strong>és</strong> segítségével hajtjuk végre:<br />
(1) (1) (1)<br />
−3,72 −8,6 n − 2,57801n − 3,89094 n = 0,<br />
( )<br />
(1) (1) (1)<br />
( n1 ) ( n2 ) ( n3<br />
)<br />
1 2 3<br />
( )<br />
− 2,57801n + 8,04615 −8,6 n − 1,01118 n = 0,<br />
(1) (1) (1)<br />
1 2 3<br />
2 2 2<br />
+ + = 1.<br />
Megjegyezzük, hogy ennél a nemlineáris egyenletrendszernél gyakran alkalmazzák azt a<br />
(1)<br />
technikát, hogy az egyik komponenst egységnyinek tekintik (legyen például most n 1 = 1,0 ),<br />
<strong>és</strong> akkor már csak egy kétismeretlenes lineáris egyenletrendszert kell megoldani 6 :<br />
(1) (1)<br />
−12,32 ⋅1− 2,57801n − 3,89094 n = 0,<br />
13<br />
2 3<br />
(1) (1)<br />
−2,57801⋅1 − 0,55385 n2 − 1,01118 n3<br />
<strong>Az</strong> egyes komponensek:<br />
= 0.<br />
(1)<br />
n1 = 1,0<br />
(1)<br />
n2 = − 5,37111<br />
(1)<br />
n3<br />
= 0,39239 .<br />
<strong>Az</strong> egységvektorrá történő átalakításhoz meghatározzuk ennek a vektornak a hosszát:<br />
(1) 2 2 2<br />
n = 1 + 5,37111 + 0,39239 = 5, 47748.<br />
A végleges normált első sajátvektor:<br />
T<br />
n 1 = [ 0,1826 − 0,9806 0,0716]<br />
.<br />
A második sajátvektor számításához a második sajátértéket (főnyúlást) használjuk fel:<br />
−3,72 − 6,2<br />
(2) (2) (2)<br />
n − 2,57801n − 3,89094 n = 0,<br />
( )<br />
1 2 3<br />
( )<br />
(2) (2) (2)<br />
− 2,57801n 1 + 8,04615 − 6,2 n2 − 1,01118 n3<br />
= 0.<br />
Legyen most is például az első iránykoszinusz értéke egységnyi:<br />
(2) (2)<br />
n1 → n1<br />
= 1,<br />
így a kétismeretlenes lineáris egyenletrendszerünk:<br />
(2) (2)<br />
−9,92 ⋅1− 2,57801n − 3,89094 n = 0,<br />
A megoldás:<br />
A vektor hossza:<br />
2 3<br />
−2,57801⋅ 1+ 1,84615 n − 1,01118 n = 0.<br />
(2) (2) (2)<br />
1 2 3<br />
(2) (2)<br />
2 3<br />
n = 1,0 n = 0,0 n = − 2,54951 .<br />
(2) 2 2 2<br />
n = 1 + 0,0 + 2,54951 = 2,73862<br />
A második főirány normált vektora:<br />
T<br />
n 2 = [ 0,3651 0,0 − 0,9309]<br />
.<br />
A harmadik főirány meghatározása ugyanilyen lép<strong>és</strong>ekkel történik. Megadjuk a<br />
r<strong>és</strong>zeredményeket (most is az első komponenst választottuk egységnyinek az<br />
egyenletrendszer megoldásánál):<br />
6 Ennél a fajta megoldásnál vigyázni kell arra, nehogy az egységnyire felvett komponens véletlenül<br />
merőleges legyen a végleges sajátvektor síkjára (ilyenkor rossz megoldást ad ez a módszer).
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
n = 1,0 n = 0, 21483 n = 0,39223 ,<br />
(3) (2) (2)<br />
1 2 3<br />
T<br />
[ ]<br />
14<br />
(3) 2 2 2<br />
n = 1 + 0, 21483 + 0,39223 = 1,09545 .<br />
n 3 = 0,9129 0,1961 0,3581 .<br />
Megjegyezzük, hogy a harmadik főirányt az előző kettő vektoriális szorzata segítségével is<br />
<strong>kis</strong>zámíthatjuk.<br />
5.<strong>2.</strong> Határozzuk meg egy sík feszültségi állapotban lévő tárcsa egy adott pontjához<br />
tartozó jobb Cauchy-tenzor főnyúlásait. A deformációgradiens-tenzor adott.<br />
A gradiens-tenzor:<br />
A jobb Cauchy-tenzor:<br />
A sajátértékfeladat:<br />
A karakterisztikus egyenlet:<br />
A főnyúlások:<br />
⎡3 −1<br />
0⎤<br />
F =<br />
⎢<br />
2 2 0<br />
⎥<br />
⎢ ⎥<br />
,<br />
⎢⎣ 0 0 1⎥⎦<br />
⎡13 1 0⎤<br />
T<br />
C = F F =<br />
⎢<br />
1 5 0<br />
⎥<br />
⎢ ⎥<br />
.<br />
⎢⎣ 0 0 1⎥⎦<br />
⎡<br />
⎣C I ⎤<br />
⎦<br />
2<br />
13 − λ 1 0<br />
2 2<br />
det − λ = 1 5 − λ 0<br />
2<br />
0 0 1−<br />
λ<br />
2 4 2<br />
( λ )( λ λ )<br />
1− − 18 + 64 = 0.<br />
λ = 9 ± 17, λ = 1.<br />
2 2<br />
1,2 3<br />
A sajátvektorok:<br />
T<br />
n = 0,993 0,122 0 ,<br />
T<br />
n = − 0,122 0,933 0 ,<br />
T<br />
n = 0 0 1 .<br />
[ ] [ ] [ ]<br />
1 2 1<br />
Megjegyezzük, hogy a főnyúlások <strong>és</strong> a sajátvektorok segítségével most már egyszerűen<br />
meghatározhatjuk F poláris felbontásához tartozó R <strong>és</strong> U tenzorokat:<br />
⎡ 3,6 0,17 0⎤<br />
T T T<br />
U = C = λ1n 1n1 + λ2 n2 n2 + λ3n<br />
3n 3 =<br />
⎢<br />
0,17 2, 23 0<br />
⎥<br />
⎢ ⎥<br />
,<br />
⎢⎣ 0 0 1⎥⎦<br />
illetve<br />
0,86 0,51 0<br />
1<br />
R FU 0,51 0,86 0 .<br />
0 0 1<br />
−<br />
⎡ − ⎤<br />
= =<br />
⎢<br />
−<br />
⎥<br />
⎢ ⎥<br />
⎢⎣ ⎥⎦<br />
Jelen esetben R másképpen is számítható, ha kihasználjuk a sík feszültségi állapotot, hiszen<br />
ilyenkor<br />
⎡ cosθ sinθ 0⎤<br />
R =<br />
⎢<br />
sinθ cosθ 0<br />
⎥<br />
⎢<br />
−<br />
⎥<br />
.<br />
⎢⎣ 0 0 1⎥⎦<br />
Ha kihasználjuk az<br />
.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
−1<br />
R = R <strong>és</strong> U = R F, U = U<br />
T T T<br />
összefügg<strong>és</strong>eket, akkor felírható az alábbi feltételi egyenlet:<br />
U12 = R11F12 + R21F22 = R12 F11 + R22F21 = U 21 .<br />
Innen az ismeretlen szög meghatározható:<br />
F12 − F21<br />
�<br />
tgθ<br />
= ⇒ θ = −31,0<br />
F + F<br />
11 22<br />
5.3. Bontsunk fel egy gradiens-tenzor szorzat alakban deviátoros <strong>és</strong> gömbi r<strong>és</strong>zre úgy,<br />
hogy alkalmazható legyen rugalmasan összenyomhatatlan anyagok vizsgálatára!<br />
A számítás során a harmadik előadás 3.12-es összefügg<strong>és</strong>ét fogjuk használni:<br />
d<br />
g<br />
15<br />
1 1<br />
3 3<br />
d .<br />
F Fg<br />
F , ⋅ = ahol F J I , F J F<br />
−<br />
= =<br />
Legyen például a gradiens-tenzor az alábbi:<br />
⎡3 −1<br />
0⎤<br />
F =<br />
⎢<br />
2 2 0<br />
⎥<br />
⎢ ⎥<br />
.<br />
⎢⎣ 0 0 1⎥⎦<br />
A tenzor determinánsa:<br />
J = F = 8 .<br />
Ennek megfelelően a két komponens:<br />
⎡2 0 0⎤ ⎡1,5 −0,5<br />
0 ⎤<br />
1/3 −1/3<br />
J = 2, J = 0,5, F =<br />
⎢<br />
0 2 0<br />
⎥<br />
, F<br />
⎢<br />
1 1 0<br />
⎥<br />
g ⎢ ⎥<br />
=<br />
dev ⎢ ⎥<br />
.<br />
⎢⎣ 0 0 2⎥⎦ ⎢⎣ 0 0 0,5⎥⎦<br />
Ellenőrizhető, hogy a két tenzor szorzata megadja az eredeti gradiens-tenzort, továbbá a<br />
deviátoros r<strong>és</strong>z determinánsa egységnyi ( 1<br />
dev )<br />
F = .<br />
Rugalmasan összenyomhatatlan anyagoknál a deviátoros r<strong>és</strong>zt szokás felhasználni a<br />
módosított <strong>alakváltozás</strong>i vagy nyúlási tenzorok számítására, így például a módosított jobb<br />
Cauchy-tenzor ilyen esetben:<br />
ˆ T −2/3 T −2/3<br />
C = F F = J F F = J C .<br />
dev dev<br />
5.4. Határozzuk meg az 5.1-es példában szereplő AG szakasz hosszváltozását!<br />
Számítsuk ki először a két pontot összekötő egyeneshez tartozó vektorokat:<br />
T<br />
AG<br />
[ ] 2 2 2<br />
r = 50 100 70 , r = 50 + 100 + 70 = 131,91 cm .<br />
<strong>Az</strong> irány egységvektora:<br />
n = 0,37905 0,75810 0,53067 .<br />
T<br />
AG<br />
[ ]<br />
Egy adott irányhoz tartozó GL-<strong>alakváltozás</strong>t az X,Y,Z bázisban megadott GL-tenzor<br />
transzformálásával tudjuk meghatározni. Most nem kell az eg<strong>és</strong>z tenzort transzformálnunk,<br />
elegendő csak az AG szakasz irányának megfelelő „metszetet” előállítanunk:
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
AG<br />
T<br />
AG AG<br />
E = n En =<br />
⎡−3,72000 −2,57801 −3,89094⎤<br />
⎡0,37095⎤ −3<br />
= [ 0,37905 0,75810 0,53067<br />
⎢<br />
] 2,57801 8,04615 1,01118<br />
⎥ ⎢<br />
0,75810<br />
⎥<br />
⎢<br />
− −<br />
⎥ ⎢ ⎥<br />
10 =<br />
⎢⎣ −3,89094 −1,01118<br />
4,67385 ⎥⎦ ⎢⎣ 0,53067⎥⎦<br />
−3<br />
= 1,54541⋅ 10<br />
Ennek az értéknek a segítségével az 1D vizsgálatoknál szokásos <strong>alakváltozás</strong> is <strong>kis</strong>zámítható<br />
(lásd a második <strong>hét</strong> gyakorlatának <strong>2.</strong>1-es példáját):<br />
ag − AG<br />
−3 −3<br />
ε AG = = 1+ 2EAG − 1 = 1+ 21,54541⋅ 10 − 1 = 1,54422 ⋅ 10 .<br />
AG<br />
<strong>Az</strong> új átló értéke ennek segítségével:<br />
−3<br />
ag = AG ⋅ 1+ ε = 131,91 1+ 1,54422 ⋅ 10 = 132,11 cm .<br />
( AG ) ( )<br />
5.5. Határozzuk meg az ábrán látható sík <strong>alakváltozás</strong>i állapothoz tartozó <strong>alakváltozás</strong>jellemzőket<br />
(elforgatott rendszerhez tartozó értékek, főnyúlások)!<br />
<strong>Az</strong> ábrán látható <strong>alakváltozás</strong>-komponensek most <strong>kis</strong> <strong>alakváltozás</strong>okat jelentenek. Számítsuk<br />
ki első lép<strong>és</strong>ként az x-y rendszerhez képest 35 fokkal elforgatott új x′ − y′<br />
bázisban az<br />
<strong>alakváltozás</strong>okat (lásd a következő ábrát)!<br />
16
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
Kétdimenziós esetben az általános transzformáló összefügg<strong>és</strong>ek egyszerű skalár<br />
kifejez<strong>és</strong>ekkel is megadhatók, a gyakorlatban többnyire ezeket használják. Ilyenkor<br />
trigonometriai átalakításokkal a kétszeres szögeket használják:<br />
1 1<br />
ε ′ x x = ( ε x x + ε yy ) + ( εx x − ε yy ) cos 2ϑ + εx y sin 2 ϑ,<br />
2 2<br />
1 1<br />
ε ′ y y = ( ε x x + ε yy ) − ( εx x − ε yy ) cos 2ϑ − εx y sin 2 ϑ,<br />
2 2<br />
1<br />
ε ′ x y = − ( εx x − ε yy ) sin 2ϑ + εx y cos 2 ϑ.<br />
2<br />
Behelyettesítve a megadott értékeket:<br />
−3 ⎧1 1<br />
� � ⎫<br />
−3<br />
ε ′ x x = 10 ⎨ ( − 0,75 + 0,5) + ( −0,75 − 0,5) cos70 − 0, 4sin 70 ⎬ = −0,7146 ⋅10<br />
,<br />
⎩2 2<br />
⎭<br />
−3 ⎧1 1<br />
� � ⎫<br />
−3<br />
ε ′ y y = 10 ⎨ ( − 0,75 + 0,5) − ( −0,75 − 0,5) cos 70 + 0,4sin 70 ⎬ = 0, 4646⋅10 ,<br />
⎩2 2<br />
⎭<br />
−3 ⎧ 1<br />
� � ⎫<br />
−3<br />
ε ′ x y = 10 ⎨− ( −0,75 − 0,5) sin 70 − 0,4cos70 ⎬ = 0,4505 ⋅10<br />
.<br />
⎩ 2<br />
⎭<br />
A transzformáció helyessége a két különböző rendszerben számított <strong>alakváltozás</strong>i<br />
invariánsok összehasonlításával ellenőrizhető:<br />
I′<br />
( ε ) = ε + ε = − 0,00075 + 0,0005 = −0,00025,<br />
1<br />
x x y y<br />
I′<br />
( ε ′ ) = ε ′ + ε ′ = − 0,0007146 + 0,0004646 = −0,00025,<br />
1<br />
x x y y<br />
ε ε −0,00075 −0,0004<br />
I′<br />
ε = = = − ⋅<br />
x x x y<br />
−7<br />
2(<br />
) 5,35 10 ,<br />
ε y x ε y y −0,0004<br />
0,0005<br />
I′<br />
′<br />
ε′ ε′ −0,0007146<br />
0,0004505<br />
x x x y<br />
−7<br />
2(<br />
ε ) = = = − 5,35 ⋅10<br />
,<br />
ε′ y x ε′<br />
y y 0,0004505 0,0004646<br />
A harmadik invariáns sík feladatok esetében mindig zérus.<br />
Határozzuk meg ezek után a főnyúlások értékeit.<br />
Kétdimenziós esetben a sajátértékfeladat karakterisztikus egyenlete másodfokú, így az ismert<br />
megoldóképlet segítségével számíthatók a főnyúlások. A helyes indexszel<strong>és</strong>nél mindig<br />
figyelembe kell vennünk, hogy most az eredeti másodrendű <strong>alakváltozás</strong>-mátrix egy sora <strong>és</strong><br />
egy oszlopa zérus, így minden esetben van egy darab zérusértékű főnyúlás. Ennek indexét a<br />
sík feladatnál kapott eredmények előjelének figyelembevételével kell megadni.<br />
A sík <strong>alakváltozás</strong>i állapotnál alkalmazott megoldóképlet:<br />
ε x x + ε y y<br />
ε 1,3 = ±<br />
2<br />
2<br />
⎛ εx x − ε y y ⎞ ⎧<br />
2 −3<br />
⎪− 0,75 + 0,5<br />
⎜ ⎟ + εx y ⇒ε 1,3 = 10 ⎨ ±<br />
⎝ 2 ⎠ ⎪ 2<br />
⎩<br />
2<br />
⎛ −0,75 − 0,5 ⎞<br />
⎫<br />
2 ⎪<br />
⎜ ⎟ + ( −0,<br />
4)<br />
⎬<br />
⎝ 2 ⎠ ⎪⎭<br />
A zérus érték figyelembevételével a főnyúlások:<br />
−3 ε 1 = 0,617 ⋅10 , ε 2 = 0,<br />
−3<br />
ε 3 = −0,867 ⋅ 10 .<br />
Ebben az esetben a fő-szögtorzulások értéke mindig zérus.<br />
<strong>Az</strong> invariánsokat újból felhasználhatjuk ellenőrz<strong>és</strong>re:<br />
I′<br />
( ε ) = ε + ε + ε = 0,000617 + 0 − 0,000867 = −0,00025,<br />
1 i 1 2 3<br />
17<br />
( )<br />
I′<br />
ε = ε ε + ε ε + ε ε = ⋅ − = − ⋅<br />
−7<br />
2( i ) 1 3 1 2 2 3 0,000617 0,000867 5,35 10 .
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A főirányok meghatározás is lényegesen egyszerűbb sík <strong>alakváltozás</strong>i állapot esetén:<br />
2εx y<br />
2( −0,0004)<br />
tg2α i = ⇒ tg2α<br />
i = = 0,64 ⇒ α 1 = 106,31 , α 3 = 16,31<br />
ε − ε −0,00075 − 0,0005<br />
x x y y<br />
18<br />
� � .<br />
A feladat befejez<strong>és</strong>eként megmutatjuk az <strong>alakváltozás</strong>ok Mohr-féle grafikus ábrázolását is,<br />
az eredeti tenzor elemeinek illetve a főnyúlásoknak a feltüntet<strong>és</strong>ével.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
6. Műveletek <strong>alakváltozás</strong>tenzorokkal<br />
6.1. Vizsgáljuk meg az ábrán látható, deformálódott négyzet különböző<br />
<strong>alakváltozás</strong>jellemzőit!<br />
<strong>Az</strong> ábrán látható 2D cellának feltüntettük kezdeti, <strong>és</strong> egy pillanatnyi helyzethez tartozó<br />
állapotát.<br />
Megadjuk a mozgásegyenleteket is, de mivel most csak egy t = konstans állapot vizsgálatát<br />
fogjuk elvégezni, ezért az x = Φ ( X, t)<br />
kapcsolati egyenletet egy rögzített, a további vizsgálat<br />
számára közömbös <strong>nagy</strong>ságú időérték behelyettesít<strong>és</strong>ével írjuk fel. A vizsgált állapotnál ezek<br />
az egyenletek a következők:<br />
x = 1+ 1,01X + 0,03 Y, y = 2 + 0,02 X + 1,04 Y, z = Z .<br />
Ennek inverz változata:<br />
4900 5200 150 10000 100 5050<br />
X = − + x − y, Y = − − x + y, Z = z .<br />
5249 5249 5249 5249 5249 5249<br />
A további vizsgálatok céljára fontos pontok kezdeti <strong>és</strong> pillanatnyi koordinátáit gyűjtsük ki<br />
egy külön táblázatba:<br />
Vizsgálandó pontok: X x<br />
A(0,0 – 0,0) a(1,00 – 2,00)<br />
B(1,0 – 0,0) b(2,01 – 2,02)<br />
C(0,0 – 1,0) c(1,03 – 3,04)<br />
D(1,0 – 1,0) d(2,04 – 3,06)<br />
E(0,5 – 1,0) e(1,535 – 3,05)<br />
F(107/202 – 0,0) f(1,535 – 20307/10100)<br />
a./ Első lép<strong>és</strong>ként számítsuk ki a deformált cellánál az egyes szakaszok új hosszát elemi<br />
koordináta-geometriai összefügg<strong>és</strong>ek segítségével, az <strong>alakváltozás</strong>-tenzorok alkalmazása<br />
nélkül! Ehhez a számításhoz a következő vektorokra lesz szükségünk:<br />
19
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
⎡1,01⎤ r ab = ⎢<br />
0,02<br />
⎥<br />
⎣ ⎦<br />
⇒ r ab =<br />
2 2<br />
1,01 + 0,02 = 1,010198,<br />
⎡0,03⎤ r ac = ⎢<br />
1,04<br />
⎥<br />
⎣ ⎦<br />
⇒ r ac =<br />
2 2<br />
0,03 + 1,04 = 1,0404326,<br />
⎡1,04 ⎤<br />
r ad = ⎢<br />
1,06<br />
⎥<br />
⎣ ⎦<br />
⇒ r a d =<br />
2 2<br />
1,04 + 1,06 = 1,4849916,<br />
⎡ 0,00 ⎤<br />
r e f = ⎢<br />
1,039406<br />
⎥<br />
⎣− ⎦<br />
⇒ r e f =<br />
2 2<br />
0,0 + ( − 1,039406) = 1,039406,<br />
⎡0,029703⎤ r E F = ⎢<br />
1,0<br />
⎥<br />
⎣ − ⎦<br />
⇒ r E F =<br />
2 2<br />
0,029703 + ( − 1,0) = 1,000441.<br />
Számítsuk ki a cab pontok által meghatározott szöget is:<br />
cos ϕ c ab =<br />
r ab ⋅r ac<br />
r r<br />
1,01 ⋅ 0,03 + 0,02 ⋅1,04<br />
�<br />
= = 0,048618375 ⇒ ϕ cab = 87, 213274 .<br />
1,010198 ⋅1,0404326<br />
ab ac<br />
Mivel a kezdeti <strong>és</strong> pillanatnyi állapotok közötti összefügg<strong>és</strong>eket lineáris kapcsolati<br />
egyenletekkel adtuk meg, a vektorok segítségével kapott eredményeink pontosak.<br />
b./ Folytassuk most a számítást a Lagrange-bázis felhasználásával, a GL-tenzor<br />
<strong>kis</strong>zámításával! Ehhez először az eltolódásfüggvények meghatározására lesz szükségünk:<br />
u = x − X , v = y − Y, w = z − Z,<br />
így :<br />
u( X , Y, Z) = (1+ 1,01 X + 0,03 Y ) − X = 1+ 0,01X + 0,03 Y,<br />
v = ( X , Y, Z) = (2 + 0,02 X + 1,04 Y ) − Y = 2 + 0,02 X + 0,04 Y,<br />
w = ( X , Y, Z) = Z − Z = 0.<br />
Most már számíthatók a GL-tenzorhoz szükséges deriváltak. Először külön megadjuk a<br />
lineáris tagokat, hiszen ezek segítségével a <strong>kis</strong> <strong>alakváltozás</strong>okhoz szükséges tenzor már<br />
felépíthető:<br />
∂u = 0,01,<br />
∂X ∂u = 0,03,<br />
∂Y ∂v = 0,02,<br />
∂X ∂v<br />
= 0,04 ⇒<br />
∂Y<br />
⇒ ε x x = 0,01, ε y y = 0,04,<br />
1<br />
ε x y = ( 0,03 + 0,02) = 0,025.<br />
2<br />
A <strong>nagy</strong> <strong>alakváltozás</strong>okat jellemző GL-tenzor elemei:<br />
1 2 2 2 1 2 2 2<br />
EX X = 0,01 + ( 0,01 + 0,02 + 0 ) = 0,01025, EY<br />
Y = 0,04 + ( 0,03 + 0,04 + 0 ) = 0,04125,<br />
2 2<br />
1<br />
EX<br />
Y = ( 0,03 + 0,02 + 0,01⋅ 0,03 + 0,02 ⋅ 0,04 + 0⋅ 0) = 0,02555.<br />
2<br />
A GL-tenzor segítségével – a korábbi példákban már alkalmazott módszerrel azonos módon<br />
számíthatók egyes oldalélek megnyúlásai. Ilyenkor mindig az 1D fizikai <strong>alakváltozás</strong>okra<br />
alkalmazott összefügg<strong>és</strong>ekkel dolgozunk, így például X irányban:<br />
fiz.<br />
l − L r ab − r AB<br />
ε X = 1+ 2EX X − 1 = = .<br />
L r<br />
20<br />
AB
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
Innen r ab (vagyis a megváltozott hosszúságú oldalél) értéke:<br />
r = 1+ 2E ⋅ r = 1+ 2⋅ 0,01025 ⋅ 1,0 = 1,010198 .<br />
ab X X AB<br />
Ez az érték pontosan megegyezik az előzőekben – koordinátageometriai úton számított –<br />
értékekkel.<br />
Hasonlóan számítható r ac <strong>nagy</strong>sága is:<br />
fiz.<br />
l − L r ac − r AC<br />
ε Y = 1+ 2EY Y − 1 = = ⇒<br />
L r<br />
AC<br />
r = 1+ 2E ⋅ r = 1+ 2⋅ 0,04125 ⋅ 1,0 = 1,0404326.<br />
ac Y Y AC<br />
Ez az érték is azonos a korábban számítottal.<br />
Fontos megjegyeznünk, hogy a GL-tenzor segítségével eddig számított két érték olyan<br />
oldalélekre vonatkozott, melyek eredeti iránya megegyezett az X, illetve az Y koordinátatengelyekével!<br />
Minden más esetben először magát a GL-tenzort kell transzformálnunk a<br />
keresett irányba <strong>és</strong> csak utána hajthatók végre az itt alkalmazott eljárás lép<strong>és</strong>ei.<br />
Ugyancsak hibás az a gondolkodásmód, amely például az ad átló (új) hosszát a most<br />
számított ab <strong>és</strong> ac szakaszhosszak felhasználásával Pithagorász-tétellel kívánná<br />
meghatározni:<br />
2 2 2<br />
r = r + r ⇒ r = r + r = + =<br />
a d ab ac a d ab ac<br />
21<br />
2 2<br />
1,010198 1,0404326 1,4501724<br />
Összehasonlítva az adott szakasz hosszára korábban kapott eredménnyel, látható, hogy ez az<br />
érték hibás!<br />
A helyes számításhoz a GL-tenzor elemeit transzformálnunk kell a keresett irányba, jelen<br />
esetben az AD átló által megadott tengely irányába (ennek megfelelően a transzformáció<br />
szöge 45 fok):<br />
1 1<br />
EX ′ X ′ = ( EX X + EY Y ) + ( EX X − EY Y ) cos 2α + EX<br />
Y sin 2α<br />
=<br />
2 2<br />
1 1<br />
� �<br />
= ( 0,01025 + 0,04125) + ( 0,01025 − 0,04125) cos90 + 0,02555sin 90 = 0,0513<br />
2 2<br />
Ennek felhasználásával már alkalmazható az előző technika:<br />
fiz.<br />
l − L r a d − r AD<br />
ε X ′ = 1+ 2EX ′ X ′ − 1 = = ⇒<br />
L r<br />
AD<br />
r = 1+ 2E ⋅ r = 1+ 2⋅ 0,0513 ⋅ 2 = 1, 4849916.<br />
a d X ′ X ′ AD<br />
Ez már pontosan megegyezik a legelőször számított szakaszhosszal. 7<br />
A két (koordináta-tengelyekkel eredetileg párhuzamos) oldal által meghatározott új szög is<br />
számítható az új értékekből:<br />
2E<br />
fiz.<br />
12<br />
cos ϕ = ⇒<br />
1+ 2E 1+ 2E<br />
11 22<br />
2E 2⋅ 0,02555<br />
fiz.<br />
X Y<br />
cos ϕ c ab = = = 0,048618375.<br />
1+ 2E 1+ 2E 1+ 2⋅ 0,01025 1+ 2⋅ 0,04125<br />
X X Y Y<br />
7 <strong>Az</strong> eltér<strong>és</strong> a pontos <strong>és</strong> a Pithagorász-tétellel számított hossz között közel 50 %-os, ezért durva hibát<br />
követünk el, ha nem a pontos eljárást alkalmazzuk.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
A számítás most is pontosan egyezik a korábbival.<br />
Érdekes megvizsgálnunk, hogy mekkora eltér<strong>és</strong>t okozna, ha a számításokban a linearizált<br />
<strong>alakváltozás</strong>oknak megfelelő tenzor-komponensekkel dolgoznánk. Ezek értékét már<br />
korábban <strong>kis</strong>zámítottuk, most csak felhasználjuk az ellenőrz<strong>és</strong>nél. Kis <strong>alakváltozás</strong>ok esetén<br />
az alábbi feltételez<strong>és</strong>eket használjuk:<br />
fiz. fiz. fiz.<br />
ε = ε , ε = ε , cosϕ = 2ε<br />
.<br />
X X X Y Y Y c ab X Y<br />
Ebben az esetben például az ab szakasz hossza:<br />
r − r = ε r ⇒ r = r 1+ ε = 1,0 1+ 0,01 = 1,01 ,<br />
ab AB X X AB ab AB X X<br />
22<br />
( ) ( )<br />
vagyis a hossznöveked<strong>és</strong> ebben az esetben 0,01, ami kb. 2 %-kal tér el a pontos értéktől<br />
(0,010198).<br />
Ha ugyanezeket az ellenőrző lép<strong>és</strong>eket megismételjük a többi számított mennyiségnél, akkor<br />
a következő eredményeket kapjuk:<br />
r = r 1+ ε = 1,0 1+ 0,04 = 1,04 ⇒ (0,04% − os eltér<strong>és</strong>)<br />
ac AC Y Y<br />
( ) ( )<br />
1 1<br />
� �<br />
ε X ′ X ′ = ( 0,01 + 0,04) + ( 0,01 − 0,04) cos90 + 0,025sin 90 = 0,05,<br />
2 2<br />
r = r 1+ ε = 2 1+ 0,05 = 1, 4849242 ⇒ (0,1% − os eltér<strong>és</strong>)<br />
a d AD X X<br />
( ′ ′ ) ( )<br />
fiz. fiz.<br />
�<br />
cos ϕ = 2ε = 2⋅ 0,025 = 0,05 ⇒ ϕ = 87,13402 ⇒ (2,84% − )<br />
c ab X Y c ab os eltér<strong>és</strong><br />
c./ A számítás befejez<strong>és</strong>eként számítsuk ki az AH-tenzor egy elemét <strong>és</strong> a segítségével<br />
meghatározható oldalhosszat.<br />
A három eltolódásfüggvény az Euler-koordinátákkal kifejezve:<br />
u( x, y, z) = 0,9335111− 0,0093351x + 0,0285768 y,<br />
v( x, y, z) = 1,9051247 + 0,0190512 x + 0,0379120 y,<br />
w( x, y, z)<br />
= 0.<br />
Legyen a keresett AH-<strong>alakváltozás</strong> például az e y y komponens. A meghatározásához<br />
szükséges képlet:<br />
e<br />
y y<br />
⎡ 2 2 ⎤<br />
∂v 1 ⎛∂u ⎞ ⎛∂v ⎞ ⎛∂w⎞ = − ⎢⎜ ⎥<br />
⎜ ⎟ + ⎜<br />
⎟ + ⎜<br />
⎟<br />
∂y 2<br />
⎢ ⎜ ⎜∂y ⎟ ⎜ ⎜∂y ⎟ ⎜ ∂y<br />
⎟ ⎟⎥<br />
.<br />
⎢⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
⎣ ⎥⎦<br />
A jobboldal legelső tagja a lineáris <strong>alakváltozás</strong>oknak megfelelő komponenst ( y y<br />
Behelyettesítve az elmozdulások függvényeit:<br />
∂u ∂v<br />
= 0,02855768, = 0,0379120 ⇒<br />
∂y ∂y<br />
ε ) jelenti.<br />
1<br />
2 2 2<br />
ey y = 0,0379120 − ⎡( 0,0379120) + ( 0,02855768) + 0 ⎤ = 0,0367850, εy<br />
y = 0,0379120.<br />
2 ⎣⎢ ⎦⎥<br />
Ennek az AH-<strong>alakváltozás</strong>nak a segítségével határozzuk meg például az EF szakasz (eredeti)<br />
hosszát. A számítás lép<strong>és</strong>ei hasonlóak az előzőekben alkalmazottakhoz, csak az 1D változás<br />
jellege más, hiszen most<br />
fiz.<br />
l − L<br />
ε = = 1− 1− 2ey<br />
y .<br />
l<br />
A konkrét feladatra alkalmazva 8 :<br />
8 Fontos megjegyeznünk, hogy a „pillanatnyi állapotban” az ef szakasz párhuzamos az y tengellyel,<br />
ezért alkalmazható transzformáció nélkül az AH-tenzor függőleges nyúlási komponense.
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
ε<br />
fiz.<br />
ef E F<br />
y = = 1− 1−2e y y ⇒ r EF = 1−2e y y ⋅ r e f<br />
r e f<br />
r<br />
E F<br />
r − r<br />
= 1−2 ⋅0,0367850 ⋅ 1,03946 = 1,000441.<br />
Ez az érték szintén egyezik a koordinátageometriai úton számítottal. Ha ugyanezt a számítást<br />
a linearizált <strong>alakváltozás</strong>-komponens felhasználásával határozzuk meg, akkor az elkövetett<br />
hiba <strong>nagy</strong>sága a következő lesz:<br />
r . ef − r<br />
fiz<br />
E F<br />
εy = = εy y ⇒ r EF = ( 1−ε<br />
y y ) ⋅ r e f<br />
r<br />
r<br />
E F<br />
e f<br />
( )<br />
= 1−0,0379120 ⋅ 1,03946 = 1,000000 ⇒<br />
Hosszváltozás ∆ l = 1,039406 − 1= 0,039406,<br />
A pontos hosszváltozás : 1,039406 − 1,000441 = 0,0389649,<br />
A hiba ≈ 1,13%.<br />
6.<strong>2.</strong> Adott egy (<strong>kis</strong> <strong>alakváltozás</strong>okat jellemző) <strong>alakváltozás</strong>-tenzor. Határozzuk meg a<br />
főnyúlásokat, a főnyíró feszültségeket <strong>és</strong> az oktaéderes <strong>alakváltozás</strong>okat!<br />
⎡−0,001 ⎢<br />
<strong>Az</strong> <strong>alakváltozás</strong>-tenzor: ε = ⎢ 0<br />
⎢<br />
⎣ 0<br />
<strong>Az</strong> invariánsok:<br />
0<br />
−0,001<br />
0,000785<br />
0 ⎤<br />
⎥<br />
0,000785⎥<br />
.<br />
⎥<br />
0,002 ⎥<br />
⎦<br />
I ′ =−0,001 − 0,001+ 0,002 = 0,<br />
1<br />
2<br />
3<br />
−9<br />
0 0,001 0,000785 2,62 10 .<br />
23<br />
( )<br />
2 2<br />
−6<br />
I ′ = −0,001⋅ 0,002 −0,000785 −0,001⋅ 0,002 + − 0,001 = −3,62 ⋅10<br />
,<br />
−0,001<br />
0 0<br />
I ′ = − = ⋅<br />
0 0,000785 0,002<br />
A karakterisztikus egyenlet (lásd az 1. alatti lábjegyzetet):<br />
3 −6 −9<br />
ε −3,62 ⋅10 ε−<br />
2,62⋅ 10 = 0 .<br />
<strong>Az</strong> egyenlet gyökei adják a főnyúlásokat:<br />
ε = 0,00219, ε = − 0,001, ε = − 0,00119 .<br />
1 2 3<br />
<strong>Az</strong> invariánsok – ellenőrz<strong>és</strong>re szolgáló – újbóli számítása most a főnyúlásokkal történik:<br />
I ′ =−0,00219 −0,001− 0,00119 = 0,<br />
1<br />
I ′ = ⋅ − + − ⋅ − + − ⋅ = − ⋅<br />
2<br />
−6<br />
(0,00219) ( 0,001) ( 0,001) ( 0,00119) ( 0,00119) (0,00219) 3,62 10 ,<br />
−9<br />
I ′ 3 = (0,00219) ⋅( −0,001) ⋅( − 0,00119) = 2,62 ⋅10<br />
.<br />
<strong>Az</strong> ellenőrz<strong>és</strong> igazolta a sajátérték-számítás helyességét.<br />
Határozzuk meg most a leg<strong>nagy</strong>obb nyírási szögtorzulás értékét (Mohr-körös jellemz<strong>és</strong>,vagy<br />
általános szélsőérték-számítás alapján):<br />
γmax = ε1 − ε3<br />
= 0,00219 − (0,00119) = 0,00338.<br />
A következő feladatr<strong>és</strong>z az oktaéderes <strong>alakváltozás</strong>ok számítása. <strong>Az</strong> oktaéderes<br />
<strong>alakváltozás</strong>ok olyan síkokhoz tartozó értékek, melyek normálisai a főirányok által kifeszített
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
térben rendre ⎡<br />
⎢1/ ⎣<br />
3 1/ 3 1/ 3⎤<br />
⎥ értékűek. <strong>Az</strong> oktaéderes nyúlás ennek megfelelően (az<br />
⎦<br />
ε = ε n n összefügg<strong>és</strong> segítségével):<br />
n i j i j<br />
1<br />
I ′ 1<br />
εo = ( ε1 + ε2 + ε3)<br />
= = 0 .<br />
3 3<br />
<strong>Az</strong> ehhez a síkhoz tartozó szögtorzulást térbeli Pithagorász-tétellel számíthatjuk.<br />
γ<br />
Felhasználva a ϑ = tenzori nyírási <strong>alakváltozás</strong>-jelöl<strong>és</strong>t:<br />
2<br />
( ) ( ) 2<br />
1 1 2 2 3 3 1 1 2 2 3 3<br />
2<br />
ϑn =<br />
2 2 2 2 2 2<br />
ε n + ε n + ε n<br />
2 2 2<br />
− ε n + ε n + ε n ,<br />
<strong>és</strong> behelyettesítve az előbb megadott normálisok komponenseit, a következőt kapjuk a<br />
γ = 2ϑ<br />
kapcsolat figyelembevételével 9 :<br />
okt. okt.<br />
2<br />
2 2 2<br />
1/ 2<br />
γokt. = ⎡( ε1 − ε2) + ( ε2 − ε3) + ( ε3 −ε1<br />
) ⎤<br />
3<br />
⎢⎣ ⎥ .<br />
⎦<br />
Behelyettesítve a numerikus értékeket (mivel az invariánsok már rendelkez<strong>és</strong>re állnak, az ő<br />
képletüket használjuk, lévén ez a legtömörebb):<br />
2 2 −6<br />
γokt.<br />
= ( 0− 3( −3,62 ⋅ 10 ) ) = 0,00311.<br />
3<br />
Ezeket a változókat főleg a képlékenységtani számításokban használják.<br />
6.3. Határozzuk meg egy adott (<strong>kis</strong> változásokhoz tartozó) <strong>alakváltozás</strong>-tenzor deviátoros<br />
r<strong>és</strong>zét, valamint a deviátoros invariánsokat!<br />
⎡−0,005 ⎢<br />
<strong>Az</strong> <strong>alakváltozás</strong>- tenzor: ε = ⎢−0,004 ⎢<br />
⎣ 0<br />
−0,004<br />
0,001<br />
0<br />
0 ⎤<br />
⎥<br />
0 ⎥ .<br />
⎥<br />
0,001⎥<br />
⎦<br />
A deviátoros r<strong>és</strong>z számításának képlete 10 :<br />
εk<br />
k<br />
ei j = εi j − δi j ,<br />
3<br />
Ennek figyelembevételével:<br />
ahol εk k = ε11 + ε22 + ε33<br />
= − 0,003 .<br />
⎡−0,004 ⎢<br />
ei<br />
j = ⎢−0,004 ⎢<br />
⎣ 0<br />
−0,004<br />
0,002<br />
0<br />
0 ⎤<br />
⎥<br />
0 ⎥ .<br />
⎥<br />
0,002⎥<br />
⎦<br />
Ez a tenzor szintén a képlékenységtani számításokban lesz <strong>nagy</strong>on fontos mechanikai<br />
jellemző. A deviátoros tenzor első invariánsa a tenzor sajátos felépít<strong>és</strong>e miatt mindig zérus.<br />
A második <strong>és</strong> harmadik invariáns 11 :<br />
9 Megjegyezzük, hogy ez az érték kifejezhető az <strong>alakváltozás</strong>i invariánsok, illetve az eredeti<br />
<strong>alakváltozás</strong>-tenzor elemeinek segítségével is:<br />
1/ 2<br />
2 2 2 2<br />
2 2 2 2 2 2<br />
γokt. = ( I ′ 1 − 3I ′ 2)<br />
=<br />
⎡<br />
( εx εy ) ( εy εz ) ( εz εx ) 6(<br />
εx y εy z ε<br />
⎤<br />
⎢ − + − + − + + + z x ) ⎥ .<br />
3 3 ⎣ ⎦<br />
10<br />
Sajnos a deviátoros <strong>alakváltozás</strong>-tenzor mechanikában használatos szimbóluma megegyezik az<br />
AH-tenzor jelével, ezért mindig ügyelnünk kell tartalmuk pontos magyarázatára.<br />
24
Bojtár-Bagi: Mechanika MSc gyakorlatok anyaga Második <strong>hét</strong><br />
1 1 2 2 2 2 2 2<br />
J ′ 2 = ei jei j = ( ex + ey + ez + 2ex y + 2ey z + 2ez<br />
x ) =<br />
2 2<br />
1<br />
2 2 2 2 2 2<br />
=<br />
⎡<br />
( εx εy ) ( εy εz ) ( εz ε<br />
⎤<br />
⎢ − + − + − x) ⎥ + εx y + εy z + εz<br />
x =<br />
6 ⎣ ⎦<br />
1 2 2 2 1 2<br />
= ⎡( ε1 − ε2 ) + ( ε2 − ε3) + ( ε3 − ε1)<br />
⎤ = ( I ′ 1 − I ′ 2)<br />
.<br />
6 ⎣⎢ ⎦⎥<br />
3<br />
ex ex y ex<br />
z<br />
1 1 3 3 3 1 3<br />
J ′ 3 = ei je j kek i = ey x ey ey z = ( e1 + e2 + e3 ) = e1e2e 3 = ( 2I ′ 1 − 9I ′ 1I ′ 2 + 27I<br />
′ 3)<br />
.<br />
3 3 27<br />
e e e<br />
z x z y z<br />
Jelen esetben a numerikus értékek behelyettesít<strong>és</strong>e után:<br />
Felhasznált irodalom:<br />
( ) 2 1<br />
2 2 −5<br />
J ′ 2 = ⎡ 0,006 0 0,006 ⎤ ( 0,004) 2,8 10 ,<br />
6<br />
⎢ − + + + − = ⋅<br />
⎣ ⎥⎦<br />
−0,004 −0,004<br />
0<br />
J ′ = − 0,004 0,002 0<br />
−8<br />
= −4,8⋅10 .<br />
3<br />
0 0 0,002<br />
1./ Technische Noten für Studenten, TU Wien, Institut für Festigkeitslehre, 200<strong>2.</strong><br />
<strong>2.</strong>/ Bonet: Nonlinear continuum mechanics for finite elements, Cambridge University Press,<br />
2008.<br />
3./ Kaliszky – Kurutzné –Szilágyi: Szilárdságtan, Tankönyvkiadó, 1998.<br />
4./ Bojtár, I.: Mechanika MSc, BME, 2009.<br />
11 Megjegyezzük, hogy az oktaéderes szögtorzulást is gyakran összekapcsolják a második deviátoros<br />
<strong>alakváltozás</strong>i invariánssal:<br />
γ<br />
2J<br />
′<br />
3<br />
2<br />
okt.<br />
= 2 .<br />
25