MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Modele geometrice şi cinematice 35<br />
y 1 y 1 y 2 y 2 y 3<br />
l 2<br />
x 1<br />
x 2<br />
x x 3<br />
2<br />
3<br />
y 1 l 1<br />
φ 1<br />
5<br />
z<br />
φ 2<br />
θ φ3<br />
2 = φ 2<br />
θ 3 = φ 3<br />
a 2 =l 2<br />
a 3 =l 3<br />
d 2 =0<br />
d 3 =0<br />
l 3<br />
x 1<br />
z 1 z 1 z 2 z 2<br />
θ1 = φ x 3<br />
z 4<br />
φ x<br />
φ 6<br />
1<br />
4 y 4<br />
a 1 =0<br />
z 3<br />
l 5 z 5<br />
d 1 =0<br />
l 4<br />
α 1 =90 o θ 6 = φ 6<br />
l<br />
a y 6<br />
6 =0<br />
6<br />
x 1<br />
α 1 =0<br />
α 3 =0<br />
θ 4 = φ 4<br />
x 2<br />
x 5 d 6 =l 6<br />
a 4 =0<br />
θ 5 = φ 5<br />
α<br />
z 2<br />
z 6 =0<br />
5<br />
d 4 =l<br />
a 5 =0<br />
4 y 2<br />
y 5<br />
α<br />
z 6<br />
4 =90 o d 5 =l 5<br />
α 5 =90 o x 6<br />
z 1<br />
y 3<br />
y 5<br />
φ<br />
x 4 5<br />
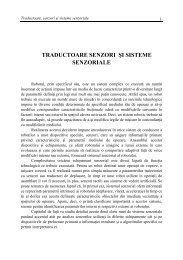
Figura 2.7<br />
În figura 2.7. sunt reprezentate axele de coordonate pentru fiecare pereche<br />
de articulaţii. De exemplu, pentru sistemele de referinţă S<br />
0 , S 1 <br />
alinierea axelor X 0 şi Χ 1 determină următorii parametri: unghiul de rotaţie 1 în<br />
jurul axei Z 0 este parametrul i , distanţa l 1 măsurată pe axa Z 0 între cele două<br />
origini este parametrul d 1 , parametrul 1<br />
este unghiul măsurat în sens orar între<br />
Z 1 şi Zo , deci 1 = 90° , iar abaterea măsurata pe axele X între cele două origini<br />
dă a 1 =0.<br />
Matricea transformării între cele două sisteme, pentru această primă<br />
articulaţie, se obţine înlocuind parametrii determinaţi în relaţia (2.23). Rezultă,<br />
cos1<br />
0 sin1<br />
0<br />
<br />
<br />
<br />
sin1<br />
0 cos1<br />
0<br />
A <br />
<br />
1<br />
0 1 0 l1<br />
<br />
<br />
<br />
0 0 0 1<br />
Parametrii celorlalte articulaţii se pot obţine în aceeaşi manieră din figura<br />
2.7, iar matrlcele corespunzătoare vor fi