MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Modele geometrice şi cinematice 47<br />
x di<br />
-<br />
x i<br />
J -1 (q)<br />
q i<br />
SA<br />
x i<br />
f(q)<br />
q i<br />
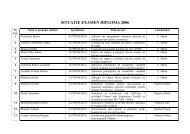
Figura 2.10<br />
xi<br />
xdi<br />
xi<br />
(2.67)<br />
sunt aplicate unui bloc de calcul ce implementează pe J -1 (q) la ieşirea căruia se<br />
generează noile variaţii q i ce asigură corectarea traiectoriei. Evident, dependenţa<br />
iacobianului de parametrii q i determină recalcularea sa la fiecare pas de operare.<br />
Avantajul principal al unui astfel de sistem de conducere este dat de<br />
simplitatea legii de conducere utilizate, modelul cinematic diferenţial asociat fiind<br />
un model liniar. Spre deosebire de modelele cinematice propriu-zise prezentate<br />
anterior şi de cele dinamice, care vor fi studiate ulterior, modele caracterizate prin<br />
neliniarităţi deosebit de complexe, modelele diferenţiale oferă avantajul liniarizării.<br />
Din nefericire, acest avantaj este, în mare măsură, anulat de efortul de calcul<br />
cerut, în special pentru calculul inversei matricei iacobiene, calcul ce nu poate fi<br />
realizat off-line datorită dependenţei coeficienţilor matricei de parametrii q i . Cu<br />
toate că în literatură s-au dezvoltat o serie de metode [4,6] care permit calculul<br />
rapid al lui J -1 (q), ele cer, în general, sisteme hardware de mare viteză, cu un preţ<br />
de cost întotdeauna prohibitiv, pentru o operare eficientă în timp real.