MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Modele geometrice şi cinematice 27<br />
1<br />
<br />
1 1 1<br />
A, y A,<br />
z A<br />
<br />
A x<br />
(2.2)<br />
unde indicele superior 1 precizează sistemul de coordinate S 1 .<br />
În afară de aceasta, direcţia vectorului de poziţie se poate exprima prin<br />
cosinuţii de direcţie,<br />
1<br />
A<br />
1<br />
1<br />
x<br />
y<br />
cos ;<br />
A z<br />
cos ; cos A<br />
(2.3)<br />
v<br />
v v<br />
Dacă acum, originea sistemului de coordonate O 1 se exprimă în raport cu un<br />
sistem S 2 prin coordonatele<br />
<br />
2 2 2<br />
1 xO<br />
, y ,<br />
1 O z<br />
1 O1<br />
<br />
O (2.4)<br />
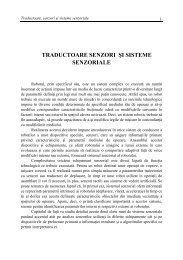
atunci punctul A se va exprima în raport cu sistemul S 2 prin,<br />
A<br />
z 1 (s 1 )<br />
z A<br />
v A<br />
y A<br />
y 1<br />
o 1<br />
x A<br />
x 1<br />
2<br />
<br />
1<br />
A<br />
(s 2 )<br />
2 1 2 1 2<br />
O , y ,<br />
1 A yO<br />
z<br />
1 A zO<br />
1<br />
z 1<br />
z 2<br />
o 2<br />
x 2 y 2<br />
Figura 2.1<br />
<br />
A<br />
y 1<br />
o 1<br />
x 1<br />
x x<br />
(2.5)<br />
Relaţia (2.5) corespunde unei reprezentări între două sisteme afectate de<br />
operaţii de translaţie (axele sînt paralele, respectiv). Dacă sistemele de<br />
coordonate sînt supuse unor mişcări de rotaţie, poziţia unui punct în diferite<br />
sisteme se poate obţine printr-o transformare corespunzătoare. Considerăm,<br />
de exemplu, sistemul S 2 obţinut prin rotaţia cu unghiul θ în jurul axei Ζ a<br />
sistemului Sj (figura 2.2).<br />
Poziţia în noul sistem se obţine prin multiplicarea coordonatelor iniţiale<br />
cu o matrice de rotaţie.<br />
(s 1 )