

Riadenie inverzného kyvadla pomocou neurónových sietí
Riadenie inverzného kyvadla pomocou neurónových sietí
Riadenie inverzného kyvadla pomocou neurónových sietí

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
FEI KKUI<br />
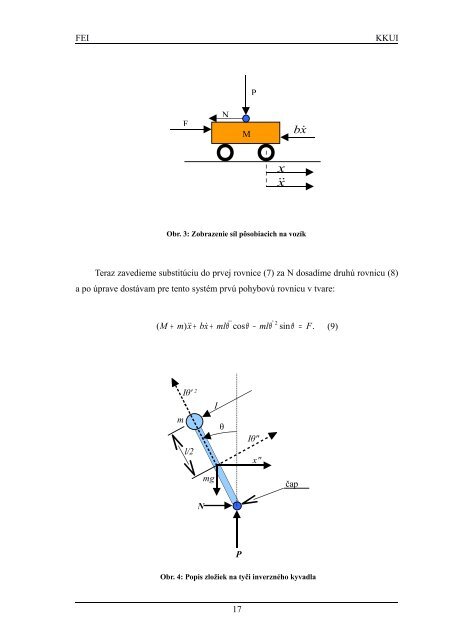
Teraz zavedieme substitúciu do prvej rovnice (7) za N dosadíme druhú rovnicu (8)<br />
a po úprave dostávam pre tento systém prvú pohybovú rovnicu v tvare:<br />
2<br />
( M + m)<br />
x<br />
+ bx<br />
+ mlθ<br />
cosθ<br />
− mlθ<br />
sin θ = F.<br />
(9)<br />
m<br />
F<br />
Iθ' 2<br />
l/2<br />
N<br />
mg<br />
I<br />
N<br />
θ<br />
P<br />
Obr. 4: Popis zložiek na tyči <strong>inverzného</strong> <strong>kyvadla</strong><br />
17<br />
M<br />
Obr. 3: Zobrazenie síl pôsobiacich na vozík<br />
P<br />
Iθ''<br />
x''<br />
x<br />
x<br />
čap<br />
b x














