

Riadenie inverzného kyvadla pomocou neurónových sietí
Riadenie inverzného kyvadla pomocou neurónových sietí
Riadenie inverzného kyvadla pomocou neurónových sietí

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
FEI KKUI<br />
Tab. 2: Výstupné hodnoty na výstupných neurónoch<br />
Pôsobenie na<br />
vozík<br />
Hodnota na 1.<br />
výst. neurónu<br />
Hodnota na 2.<br />
výst. neurónu<br />
zľava 0,9 0,1<br />
nepôsobí 0,1 0,1<br />
zprava 0,1 0,9<br />
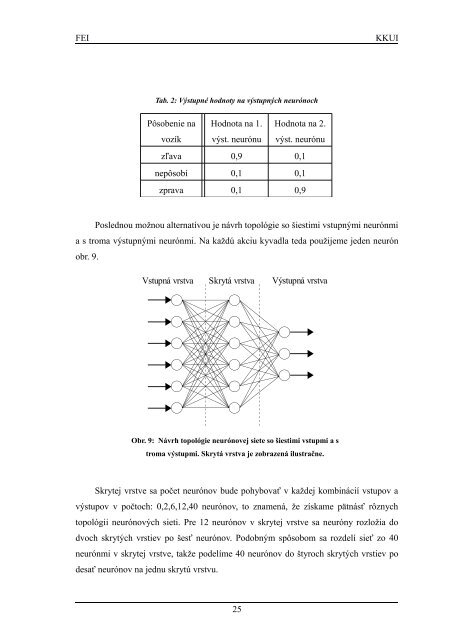
Poslednou možnou alternatívou je návrh topológie so šiestimi vstupnými neurónmi<br />
a s troma výstupnými neurónmi. Na každú akciu <strong>kyvadla</strong> teda použijeme jeden neurón<br />
obr. 9.<br />
Vstupná vrstva Skrytá vrstva<br />
Výstupná vrstva<br />
Obr. 9: Návrh topológie neurónovej siete so šiestimi vstupmi a s<br />
troma výstupmi. Skrytá vrstva je zobrazená ilustračne.<br />
Skrytej vrstve sa počet neurónov bude pohybovať v každej kombinácií vstupov a<br />
výstupov v počtoch: 0,2,6,12,40 neurónov, to znamená, že získame pätnásť rôznych<br />
topológii <strong>neurónových</strong> sieti. Pre 12 neurónov v skrytej vrstve sa neuróny rozložia do<br />
dvoch skrytých vrstiev po šesť neurónov. Podobným spôsobom sa rozdelí sieť zo 40<br />
neurónmi v skrytej vrstve, takže podelíme 40 neurónov do štyroch skrytých vrstiev po<br />
desať neurónov na jednu skrytú vrstvu.<br />
25














