BRODSKO AUTOMATSKO UPRAVLJANJE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Brodsko automatsko upravljanje<br />
prof.dr.sc. Radovan Antonić<br />
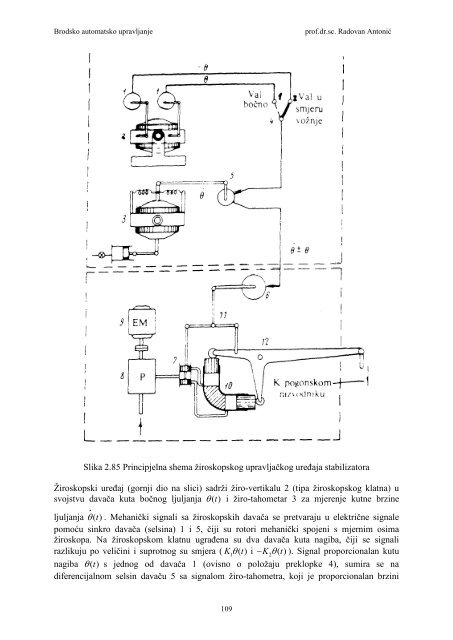
Slika 2.85 Principjelna shema žiroskopskog upravljačkog uređaja stabilizatora<br />
Žiroskopski uređaj (gornji dio na slici) sadrži žiro-vertikalu 2 (tipa žiroskopskog klatna) u<br />
svojstvu davača kuta bočnog ljuljanja θ () t i žiro-tahometar 3 za mjerenje kutne brzine<br />
ljuljanja () t . Mehanički signali sa žiroskopskih davača se pretvaraju u električne signale<br />
pomoću sinkro davača (selsina) 1 i 5, čiji su rotori mehanički spojeni s mjernim osima<br />
žiroskopa. Na žiroskopskom klatnu ugrađena su dva davača kuta nagiba, čiji se signali<br />
razlikuju po veličini i suprotnog su smjera ( Kθ<br />
() t i 1<br />
− K2 θ () t ). Signal proporcionalan kutu<br />
nagiba θ () t s jednog od davača 1 (ovisno o položaju preklopke 4), sumira se na<br />
diferencijalnom selsin davaču 5 sa signalom žiro-tahometra, koji je proporcionalan brzini<br />
θ <br />
109