BRODSKO AUTOMATSKO UPRAVLJANJE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Brodsko automatsko upravljanje<br />
Antonić<br />
prof.dr.sc. Radovan<br />
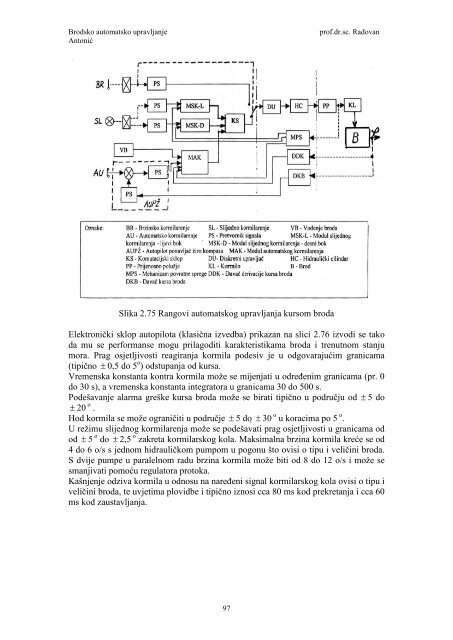
Slika 2.75 Rangovi automatskog upravljanja kursom broda<br />
Elektronički sklop autopilota (klasična izvedba) prikazan na slici 2.76 izvodi se tako<br />
da mu se performanse mogu prilagoditi karakteristikama broda i trenutnom stanju<br />
mora. Prag osjetljivosti reagiranja kormila podesiv je u odgovarajućim granicama<br />
(tipično ± 0,5 do 5 o ) odstupanja od kursa.<br />
Vremenska konstanta kontra kormila može se mijenjati u određenim granicama (pr. 0<br />
do 30 s), a vremenska konstanta integratora u granicama 30 do 500 s.<br />
Podešavanje alarma greške kursa broda može se birati tipično u području od ± 5 do<br />
± 20 o .<br />
Hod kormila se može ograničiti u područje ± 5 do ± 30 o u koracima po 5 o .<br />
U režimu slijednog kormilarenja može se podešavati prag osjetljivosti u granicama od<br />
od ± 5 o do ± 2,5 o zakreta kormilarskog kola. Maksimalna brzina kormila kreće se od<br />
4 do 6 o/s s jednom hidrauličkom pumpom u pogonu što ovisi o tipu i veličini broda.<br />
S dvije pumpe u paralelnom radu brzina kormila može biti od 8 do 12 o/s i može se<br />
smanjivati pomoću regulatora protoka.<br />
Kašnjenje odziva kormila u odnosu na naređeni signal kormilarskog kola ovisi o tipu i<br />
veličini broda, te uvjetima plovidbe i tipično iznosi cca 80 ms kod prekretanja i cca 60<br />
ms kod zaustavljanja.<br />
97