

maszyny górnicze 2/2011 - Instytut Techniki Górniczej KOMAG
maszyny górnicze 2/2011 - Instytut Techniki Górniczej KOMAG
maszyny górnicze 2/2011 - Instytut Techniki Górniczej KOMAG

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Rys.1. Struktura Zintegrowanego Systemu Sterowania ZIS [6]<br />
−<br />
−<br />
zabezpieczenie stropu wzdłuŜ całej długości<br />
ściany i minimalizacja przerw technologicznych<br />
związanych z przemieszczaniem sekcji obudowy<br />
zmechanizowanej.<br />
maksymalizację dyspozycyjności ścianowego systemu<br />
mechanizacyjnego poprzez:<br />
−<br />
−<br />
−<br />
−<br />
−<br />
dostosowanie prędkości posuwu kombajnu<br />
w zaleŜności od obciąŜenia napędów przenośnika<br />
ścianowego,<br />
dostosowanie wydajności kombajnu do wymogów<br />
przewietrzania, przy lokalnym wzroście<br />
wydzielania metanu,<br />
dostosowanie podporności wstępnej do postępu<br />
frontu ścianowego ze względu na dobre<br />
utrzymanie stropu,<br />
zabezpieczenie przed nadmiernym obciąŜaniem<br />
statycznym oraz dynamicznym układów napędowych<br />
kombajnu i przenośnika ścianowego,<br />
dostosowanie wydajności przenośników taśmowych<br />
do produktywności ściany.<br />
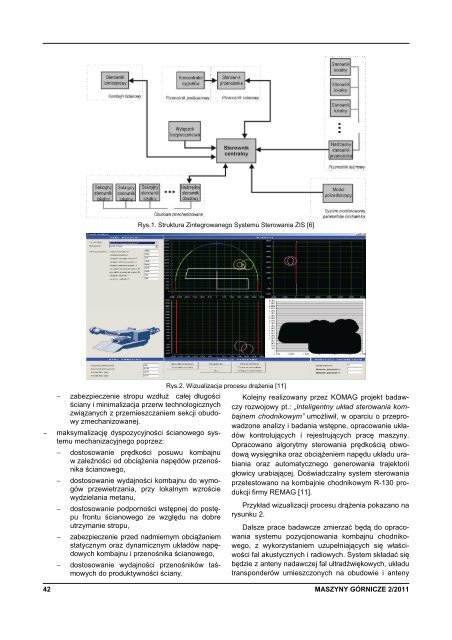
Rys.2. Wizualizacja procesu drąŜenia [11]<br />
Kolejny realizowany przez <strong>KOMAG</strong> projekt badawczy<br />
rozwojowy pt.: „Inteligentny układ sterowania kombajnem<br />
chodnikowym” umoŜliwił, w oparciu o przeprowadzone<br />
analizy i badania wstępne, opracowanie układów<br />
kontrolujących i rejestrujących pracę <strong>maszyny</strong>.<br />
Opracowano algorytmy sterowania prędkością obwodową<br />
wysięgnika oraz obciąŜeniem napędu układu urabiania<br />
oraz automatycznego generowania trajektorii<br />
głowicy urabiającej. Doświadczalny system sterowania<br />
przetestowano na kombajnie chodnikowym R-130 produkcji<br />
firmy REMAG [11].<br />
Przykład wizualizacji procesu drąŜenia pokazano na<br />
rysunku 2.<br />
Dalsze prace badawcze zmierzać będą do opracowania<br />
systemu pozycjonowania kombajnu chodnikowego,<br />
z wykorzystaniem uzupełniających się właściwości<br />
fal akustycznych i radiowych. System składać się<br />
będzie z anteny nadawczej fal ultradźwiękowych, układu<br />
transponderów umieszczonych na obudowie i anteny<br />
42 MASZYNY GÓRNICZE 2/<strong>2011</strong>













