

Identifikace a návrh °Ãzenà pro model kuli£ka na plo²e
Identifikace a návrh °Ãzenà pro model kuli£ka na plo²e
Identifikace a návrh °Ãzenà pro model kuli£ka na plo²e
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
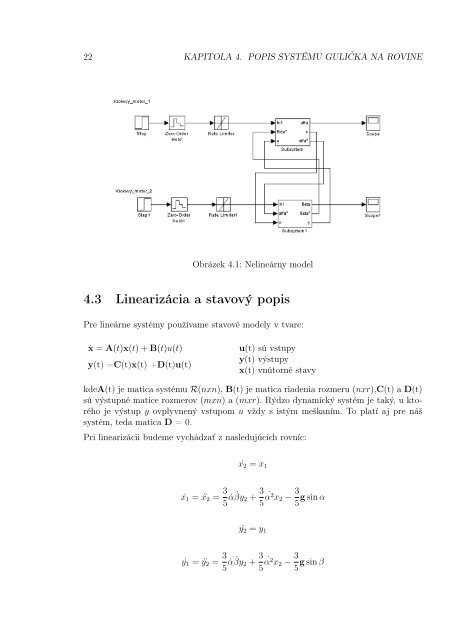
22 KAPITOLA 4. POPIS SYSTÉMU GULIČKA NA ROVINEObrázek 4.1: Nelineárny <strong>model</strong>4.3 Linearizácia a stavový popisPre lineárne systémy používame stavové <strong>model</strong>y v tvare:ẋ = A(t)x(t) + B(t)u(t)y(t) =C(t)x(t) +D(t)u(t)u(t) sú vstupyy(t) výstupyx(t) vnútorné stavykdeA(t) je matica systému R(nxn), B(t) je matica riadenia rozmeru (nxr),C(t) a D(t)sú výstupné matice rozmerov (mxn) a (mxr). Rýdzo dy<strong>na</strong>mický systém je taký, u ktoréhoje výstup y ovplyvnený vstupom u vždy s istým meškaním. To platí aj pre nášsystém, teda matica D = 0.Pri linearizácii budeme vychádzať z <strong>na</strong>sledujúcich rovníc:x˙2 = x 1x˙1 = ẍ 2 = 3 5 ˙α ˙βy 2 + 3 α5 ˙2x 2 − 3 5 g sin αy˙2 = y 1y˙1 = ÿ 2 = 3 5 ˙α ˙βy 2 + 3 α5 ˙2x 2 − 3 5 g sin β













