- Page 1 and 2: DC COURSE FILE
- Page 3 and 4: GEETHANJALI COLLEGE OF ENGINEERING
- Page 5 and 6: Convolution Codes: Encoding, decodi
- Page 7 and 8: III. To inculcate positive attitude
- Page 9 and 10: 7. Importance of the course and how
- Page 11 and 12: DC 12: Compute the power and bandwi
- Page 13 and 14: 10. Course mapping with PEO’s and
- Page 15 and 16: 13.Micro plan : Sl. no Unit No. Tot
- Page 17 and 18: 14.Detailed Notes UNIT 1 : Elements
- Page 19 and 20: A communication system may transmit
- Page 21: the wavelength is extremely long, m
- Page 25 and 26: asic elements of digital communicat
- Page 27 and 28: 4. Channel introduced many types of
- Page 29 and 30: 5. Bandwidth is another scarce reso
- Page 35 and 36: Pulse Code Modulation ‣ PCM gener
- Page 37: 77777333333333333333333333333333333
- Page 40 and 41: • The most common technique for s
- Page 42 and 43: Pulse Code Modulation (PCM) : • P
- Page 44 and 45: Figure 3.11 Illustration of the qua
- Page 46 and 47: Quantization (nonuniform quantizer)
- Page 48 and 49: Time-Division Multiplexing(TDM):
- Page 50 and 51: Let m n where T The error signal is
- Page 54 and 55: Figure 3.27 Block diagram illustrat
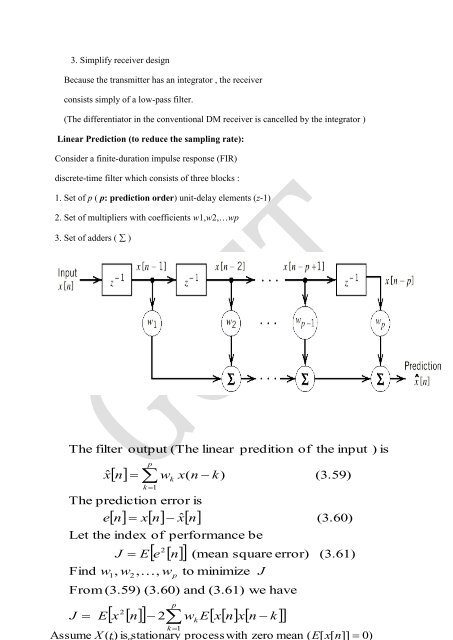
- Page 56 and 57: Adaptive Differential Pulse-Code Mo
- Page 59 and 60: ASK, OOK, MASK: • The amplitude (
- Page 61 and 62: Frequency Shift Keying: • One fre
- Page 63 and 64: s t Acos 2f ct 3 Acos 2f
- Page 65 and 66: QAM and QPR: • QAM is a combinati
- Page 67 and 68: Generation and Detection of Coheren
- Page 69 and 70: Figure 6.29 Signal-space diagram fo
- Page 72 and 73: UNIT 3 Base Band Transmission And O
- Page 74 and 75: • The tails of hI(t) decay as 1/|
- Page 76 and 77: • precoding d b d k k k2 symbol 1
- Page 78 and 79: h( t) N 1 n w n sin c t T b
- Page 80 and 81: • Equalization : to compensate fo
- Page 82 and 83: e n y n 2E en 2E en 2Eenxnk
- Page 84 and 85: - Flexibility - Same H/W may be tim
- Page 86 and 87: Interpretation of Eye Diagram:
- Page 88 and 89: The set of source symbols is called
- Page 90 and 91: We will usually neglect to mention
- Page 92 and 93: Note that if Condition1 is satisfie
- Page 94 and 95: where dmin is the minimum Hamming d
- Page 96 and 97: Linear Block Codes - example 1: •
- Page 98 and 99: • S null can be represented by it
- Page 100 and 101: G 1 0 I | P 0 0 0 1 0 0 0 0
- Page 102 and 103:
• Compared with the systematic co
- Page 104 and 105:
Convolutional Codes ◊ The encoder
- Page 106 and 107:
Convolution Codes ‣ Encoding, ‣
- Page 108 and 109:
x m m ''' j j 2 j Here each messa
- Page 110:
Representing convolutional codes: C
- Page 113 and 114:
- encoder state diagram for (n,k,L)
- Page 115 and 116:
• For this reason the non-survive
- Page 117 and 118:
sequence is 1 1 0 0 0 0 0 (why?). N
- Page 119 and 120:
Error Correction: • If there is n
- Page 121 and 122:
correct:1+1+2+2+2=8;8 ( 0.11) 0.88
- Page 123 and 124:
Motivation: Performance of Turbo Co
- Page 125 and 126:
Performance as a Function of Number
- Page 127 and 128:
General Model of Spread Spectrum Sy
- Page 129 and 130:
Slow and Fast FHSS: • Frequency s
- Page 131 and 132:
- 10 bit spreading code spreads sig
- Page 133 and 134:
Direct Sequence Spread Spectrum Usi
- Page 135 and 136:
15.Additional Topics: Voice coders
- Page 137 and 138:
'Toll Quality' voice coders, such a
- Page 139 and 140:
The well-known Shannon-Hartley law
- Page 141 and 142:
its for a known permutation of the
- Page 143 and 144:
16. Question papers: B. Tech III Ye
- Page 145 and 146:
e received code word 110110. Commen
- Page 147 and 148:
17. Question Bank 1. (a) State and
- Page 149 and 150:
21. A Discrete Memory less Source (
- Page 151 and 152:
19. Unit wise Bits CHOOSE THE CORRE
- Page 153 and 154:
(d) 5 Answers 1.C 2.D 3.B 4.A 5.C 6
- Page 155 and 156:
(b) its capacity gets doubled (c) i
- Page 157 and 158:
(d) 6 5. The cascade of two binary
- Page 159 and 160:
CHOOSE THE CORRECT ANSWER 1. The mi
- Page 161 and 162:
2.C 3.C 4.A 5.D 6.C 7.B 8.B 9.B 10.
- Page 163 and 164:
(b) H(X/Y)=1bit/message (c) H(X,Y)=
- Page 165 and 166:
(d) log m bits/symbol 6. Theencoder
- Page 167 and 168:
3. .Under error free reception, the
- Page 169 and 170:
10.B Code No: 56026 Set No. 1 JAWAH
- Page 171 and 172:
code No: 56026 Set No. 2 JAWAHARLAL
- Page 173 and 174:
B) (Power required)/( Minimum Band
- Page 175 and 176:
A) 5 B) 4 C) 2 D) 3 3. Which of the
- Page 177 and 178:
Code No: 56026 Set No. 2 JAWAHARLAL
- Page 179 and 180:
A) maximum when the source is conti
- Page 181 and 182:
Code No: 56026 :2: Set No. 4 II Fil
- Page 183 and 184:
Code No: 07A5EC09 Set No. 2 JAWAHAR
- Page 185 and 186:
Cont…..2 Code No: 07A5EC09 :2: Se
- Page 187 and 188:
8) For the data word 1110 in a (7,
- Page 189 and 190:
Code No: 07A5EC09 Set No. 3 JAWAHAR
- Page 191 and 192:
a) 0 bits b) 1 bit c) 2 bits d) inf
- Page 193 and 194:
Code No: 07A5EC09 Set No. 2 JAWAHAR
- Page 195 and 196:
a) increase with its certainty of o
- Page 197 and 198:
Code No: 07A5EC09 :2: Set No.4 10)
- Page 199 and 200:
Amplitude of 1v.This speech signal
- Page 201 and 202:
. Self Information c. Logarithmic m
- Page 203 and 204:
75. What are the advantages and dis
- Page 205 and 206:
22. Discussion Topics: Data transmi
- Page 207 and 208:
Applications and history Data (main
- Page 209 and 210:
o o Mesh network Wireless network A
- Page 211 and 212:
25. STUDENTS LIST B.TECH III YEAR I
- Page 213 and 214:
48 13R11A04L3 M SAI KUMAR 49 14R18A
- Page 215 and 216:
Group 8: 36 13R11A04K1 POLISETTY VE
- Page 217 and 218:
Unit 2 Pulse-Amplitude Modulation :
- Page 219 and 220:
Unit 3 Differential Pulse-Code Modu
- Page 221 and 222:
MISSING TOPICS UNIT 1 Hartley's law
- Page 223 and 224:
encoding the desired information an
- Page 225 and 226:
• f c denotes center frequency
- Page 227 and 228:
An interleaver installed between th
- Page 229 and 230:
Subject Contents 1.7. 1. Synopsis p