Ingenieurvermessung III - Vertiefer
Ingenieurvermessung III - Vertiefer
Ingenieurvermessung III - Vertiefer

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Fachhochschule Bochum<br />
Fachbereich Vermessungswesen und Geoinformatik<br />
Prof. Dr.-Ing. M. Bäumker<br />
Bochum, den<br />
<strong>Ingenieurvermessung</strong> <strong>III</strong> - <strong>Vertiefer</strong><br />
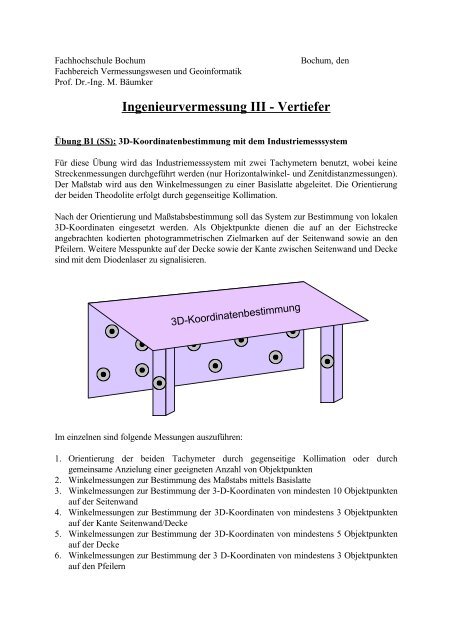
Übung B1 (SS): 3D-Koordinatenbestimmung mit dem Industriemesssystem<br />
Für diese Übung wird das Industriemesssystem mit zwei Tachymetern benutzt, wobei keine<br />
Streckenmessungen durchgeführt werden (nur Horizontalwinkel- und Zenitdistanzmessungen).<br />
Der Maßstab wird aus den Winkelmessungen zu einer Basislatte abgeleitet. Die Orientierung<br />
der beiden Theodolite erfolgt durch gegenseitige Kollimation.<br />
Nach der Orientierung und Maßstabsbestimmung soll das System zur Bestimmung von lokalen<br />
3D-Koordinaten eingesetzt werden. Als Objektpunkte dienen die auf an der Eichstrecke<br />
angebrachten kodierten photogrammetrischen Zielmarken auf der Seitenwand sowie an den<br />
Pfeilern. Weitere Messpunkte auf der Decke sowie der Kante zwischen Seitenwand und Decke<br />
sind mit dem Diodenlaser zu signalisieren.<br />
3D-Koordinatenbestimmung<br />
Im einzelnen sind folgende Messungen auszuführen:<br />
1. Orientierung der beiden Tachymeter durch gegenseitige Kollimation oder durch<br />
gemeinsame Anzielung einer geeigneten Anzahl von Objektpunkten<br />
2. Winkelmessungen zur Bestimmung des Maßstabs mittels Basislatte<br />
3. Winkelmessungen zur Bestimmung der 3-D-Koordinaten von mindesten 10 Objektpunkten<br />
auf der Seitenwand<br />
4. Winkelmessungen zur Bestimmung der 3D-Koordinaten von mindestens 3 Objektpunkten<br />
auf der Kante Seitenwand/Decke<br />
5. Winkelmessungen zur Bestimmung der 3D-Koordinaten von mindestens 5 Objektpunkten<br />
auf der Decke<br />
6. Winkelmessungen zur Bestimmung der 3 D-Koordinaten von mindestens 3 Objektpunkten<br />
auf den Pfeilern
Sämtliche Winkelmessungen sind in beiden Lagen und in zwei Sätzen durchzuführen! Für die<br />
Messung der nicht signalisierten Objektpunkte (z.B. an der Kante) ist nur eine Messung in nur<br />
einer Lage möglich. Die Signalisierung erfolgt bei diesen Objektpunkten mit dem Diodenlaser.<br />
Auswertung:<br />
1. Berechnung der gegenseitigen Orientierung der beiden Tachymeter<br />
2. Bestimmung des Maßstabs und dessen Standardabweichung<br />
3. Bestimmung der 3D-Koordinaten und deren Standardabweichungen aller Objektpunkte<br />
4. Bestimmung der Ebene der Seitenwand aus den Messungen zu drei repräsentativen<br />
Objektpunkten (ohne Überbestimmung) sowie die Richtung und Neigung der Ebene<br />
5. Bestimmung des Abstandes der anderen Objektpunkte der Seitenwand zu dieser Ebene<br />
6. Bestimmung der Ebene der Seitenwand inklusive Neigung und Richtung durch<br />
Ausgleichung der Messungen aller Objektpunkte<br />
7. Bestimmung der Ebene der Decke inklusive Neigung und Richtung durch Ausgleichung<br />
der Messungen aller Objektpunkte<br />
8. Bestimmung des Winkels zwischen Seitenwand und Decke<br />
9. Bestimmung der Koordinaten der Punkte auf der Kante aus den Winkelmessungen des<br />
ersten Tachymeters durch Schnitt a) mit der Ebene der Seitenwand und b) mit der Ebene<br />
der Decke und Vergleich der auf drei Arten berechneten 3D-Koordinaten<br />
10. Berechnung des Abstandes der Objektpunkte auf den Pfeilern a) von der Seitenwand und<br />
b) von der Decke<br />
Sämtliche Berechnungen sind durch geeignete Berechnungen zu kontrollieren und mit einer<br />
Rechenschärfe von mindestens 0.1 mm bzw. 1 cc durchzuführen!