Fachhochschule Bochum Fachbereich Vermessungswesen und ...
Fachhochschule Bochum Fachbereich Vermessungswesen und ...
Fachhochschule Bochum Fachbereich Vermessungswesen und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Fachhochschule</strong> <strong>Bochum</strong><br />
<strong>Fachbereich</strong> <strong>Vermessungswesen</strong> <strong>und</strong> Geoinformatik<br />
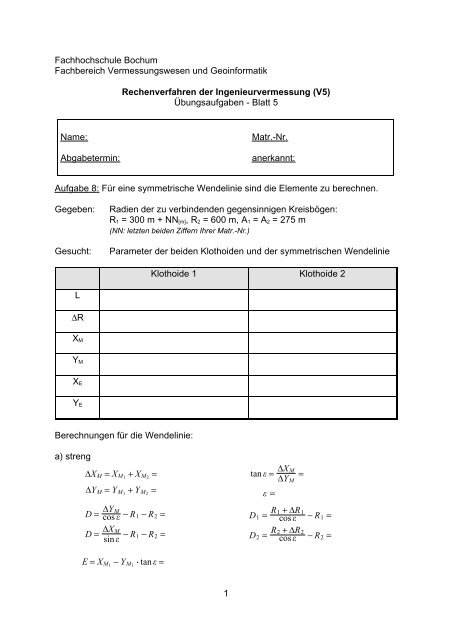
Rechenverfahren der Ingenieurvermessung (V5)<br />
Übungsaufgaben - Blatt 5<br />
Name: Matr.-Nr.<br />
Abgabetermin: anerkannt:<br />
Aufgabe 8: Für eine symmetrische Wendelinie sind die Elemente zu berechnen.<br />
Gegeben: Radien der zu verbindenden gegensinnigen Kreisbögen:<br />
R1 = 300 m + NN[m], R2 = 600 m, A1 = A2 = 275 m<br />
(NN: letzten beiden Ziffern Ihrer Matr.-Nr.)<br />
Gesucht: Parameter der beiden Klothoiden <strong>und</strong> der symmetrischen Wendelinie<br />
L<br />
ΔR<br />
XM<br />
YM<br />
XE<br />
YE<br />
Klothoide 1<br />
Berechnungen für die Wendelinie:<br />
a) streng<br />
XM = XM1 + XM2 =<br />
YM = YM1 + YM2 =<br />
D = YM<br />
cos − R1 − R2 =<br />
D = XM<br />
sin − R1 − R2 =<br />
E = XM1 − YM1 tan =<br />
1<br />
tan = XM<br />
YM =<br />
=<br />
D1 = R1 + R1<br />
cos<br />
D2 = R2 + R2<br />
cos<br />
Klothoide 2<br />
− R1 =<br />
− R2 =
Aufgabe 9: Für die Eilinie sind die Elemente zu berechnen.<br />
Gegeben: Radien der zu verbindenden gleichsinnigen Kreisbögen:<br />
R1 = 700 m + NN[m], R2 = 400 m, D = 0.931 m<br />
(NN: letzten beiden Ziffern Ihrer Matr.-Nr.)<br />
Gesucht: Parameter A der Klothoide, Richtungswinkel ε, Länge Lü des<br />
1. Näherung mit A0:<br />
Übergangsbogens, die Tangentenlängen <strong>und</strong> die Koordinaten<br />
TL ü , TK Ü<br />
der beiden Hilfspunkte C1 <strong>und</strong> C2.<br />
R = R1 R2<br />
R1 − R2 =<br />
A0 = 4 24 D R 3 =<br />
XM1 =<br />
YM1 =<br />
XM2 =<br />
YM2 =<br />
2. Näherung mit A0 + dA:<br />
dA = 0.1 m<br />
A01 = A0 + dA =<br />
XM1 =<br />
YM1 =<br />
XM2 =<br />
YM2 =<br />
L10 = A 0 2<br />
L20 = A 0 2<br />
XM = XM2 − XM1 =<br />
R1 =<br />
R2 =<br />
YM = −(YM2 − YM1 ) =<br />
= arctan XM<br />
YM =<br />
M1M2 = X M 2 + YM 2 =<br />
D0 = R1 − R2 − M1M2 =<br />
L101 = A01 2<br />
R1 =<br />
L201 = A01 2<br />
R2 =<br />
XM = XM2 − XM1 =<br />
YM = −(YM2 − YM1 ) =<br />
= arctan XM<br />
YM =<br />
M1M2 = X M 2 + YM 2 =<br />
D01 = R1 − R2 − M1M2 =<br />
dA<br />
Berechnung des Differenzenquotienten dD <strong>und</strong> des endgültigen Parameters A:<br />
dA<br />
dD =<br />
dA<br />
D01−D0 = A = A0 + dA<br />
dD (D − D0) =<br />
2
endgültige Berechnungen für A:<br />
L1 = A2<br />
R1 =<br />
L2 = A2<br />
R2 =<br />
L Ü = L2 − L1<br />
XM1 =<br />
YM1 =<br />
R1 =<br />
XM2 =<br />
YM2 =<br />
R2 =<br />
$ü = $2 − $1 =<br />
TL Ü = sin 2<br />
sin ü<br />
TK Ü = TK2 − sin 1<br />
sin ü<br />
(TL2 − TL1) − TK1 =<br />
Koordinaten der Hilfspunkte:<br />
XC1 = XM1 + R1 sin =<br />
YC1 = YM1 − R1 cos =<br />
(TL2 − TL1) =<br />
$1 = L1 2<br />
-<br />
2 A2 =<br />
$2 = L2 2<br />
-<br />
2 A2 =<br />
XM = XM2 − XM1 =<br />
YM = −(YM2 − YM1 ) =<br />
= arctan XM<br />
YM =<br />
M1M2 = X M 2 + YM 2 =<br />
XC2 = XM2 + R2 sin =<br />
YC2 = YM2 − R2 cos =<br />
Kontrolle der Berechnungen über den vorgegebenen Abstand D:<br />
vorgebebener Wert: D = 0.931000 m<br />
Kontrolle 1: D = R1 − R2 − XM 2 −XM 1<br />
sin ¡<br />
Kontrolle 2: D = R1 − R2 − M1M2 =<br />
Kontrolle 3: D = (XC2 − XC1 )2 + (YC2 − YC1 )2 =<br />
=<br />
3