vermessungskundes1-36einseitig.pdf
vermessungskundes1-36einseitig.pdf
vermessungskundes1-36einseitig.pdf

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
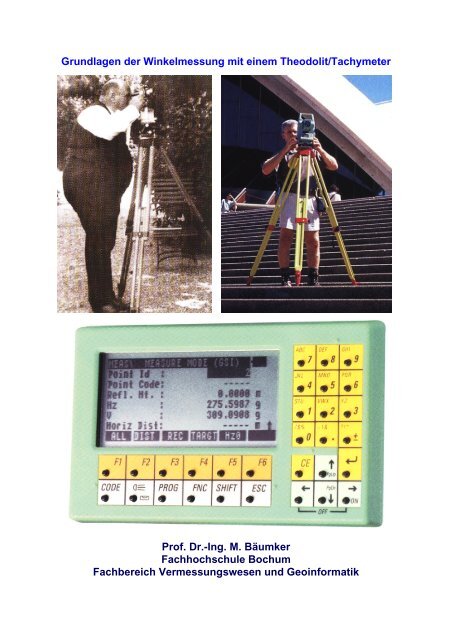
Grundlagen der Winkelmessung mit einem Theodolit/Tachymeter<br />
Prof. Dr.-Ing. M. Bäumker<br />
Fachhochschule Bochum<br />
Fachbereich Vermessungswesen und Geoinformatik
1 Einleitung<br />
Ein Winkel ist die Differenz zweier räumlicher Richtungen, wobei diese<br />
Raumrichtungen in zwei spezielle Ebene zerlegt und projiziert werden:<br />
Horizontalebene ) Horizontalwinkel, Horizontalrichtung<br />
Vertikalebene ) Vertikalwinkel, Zenitdistanz, Höhenwinkel, Elevation<br />
Während die Vertikalebene eine eindeutige 0-Richtung besitzt (Zenit bzw. Nadir), ist<br />
die Horizontalrichtung eine nicht orientierte Richtung in der Horizontalebene.<br />
Ein Winkel ist die Differenz zwischen zwei Raumrichtungen. Die Zerlegung dieser<br />
beiden Raumrichtungen bzw. deren Projektion führt zu zwei Horizontalrichtungen R1,<br />
R2 und zwei Zenitdistanzen Z1, Z2. Der Horizontalwinkel α ergibt sich dabei aus der<br />
Differenz der beiden Horizontalrichtungen<br />
= R2 − R1<br />
und ist unabhängig von der Höhe der beiden Zielpunkt P1 und P2. Der Vertikal- bzw.<br />
Zenitwinkel ist die Differenz einer speziellen Bezugsrichtung (Zenit, Nadir) und dem<br />
Punkt P in der Vertikalebene. Der Zenitwinkel (Zenitdistanz Z) zählt vom Zenit aus.<br />
Alternativ gibt es den Höhenwinkel (Elevation E), der von der Horizontalebene aus<br />
zählt. Für beide Winkel gilt:<br />
Z = 100 Gon − E<br />
1
1.1 Einheiten<br />
Folgende Einheiten für die Winkel sind gebräuchlich:<br />
Altgrad dezimal [°] bzw. Altgrad sexagesimal [° ‘ ‘’]<br />
Neugrad [Gon]<br />
Bogenmaß [rad]<br />
Vollkreis<br />
Altgrad: 360° bzw. 360° 00’ 00”<br />
Neugrad: 400 Gon<br />
Bogenmaß: 2π<br />
weitere Unterteilungen:<br />
Altgrad: 1’ = 1°/60 (Winkelminute)<br />
1’’= 1’/60 = 1°/3600 (Winkelsekunde)<br />
Neugrad: 1 cgon, cc = 1 Gon/100 = 0.01 Gon (Neuminute, centigon)<br />
1 mgon = 1 Gon/1000 = 0.001 Gon (milligon)<br />
1 cc = 1 Gon/10000 = 0.0001 Gon (Neusekunde)<br />
In der Geodäsie und bei den geodätischen Instrumente wird i.d.R. die Einheit<br />
Neugrad und deren Untereinheiten für die Winkelmessung verwendet. Geodätische<br />
Instrumente zur Horizontal- und Zenitwinkelwessung werden als Theodolite bzw.<br />
Tachymeter (mit Entfernungsmesser) bezeichnet. Damit mit diesen Instrumenten die<br />
Winkel mit höchstmöglicher Genauigkeiten gemessen werden können, sind<br />
spezielle Anforderungen an das Aufstellen des Instrumentes und an die Verfahren<br />
zur Messung Berechnung dieser Winkel zu stellen.<br />
2 Winkelmessung mit einem Theodolit und Tachymeter<br />
2.1 Aufstellen des Instruments<br />
Mit einem Theodolit bzw. einem Tachymeter lassen sich sowohl Horizontal als auch<br />
Vertikalwinkel bestimmen. Dieses erfordert eine exakte Aufstellung und<br />
Horizontierung des Theodoliten über dem Bodenpunkt. Die Horizontierung erfolgt in<br />
folgenden Schritten:<br />
1. Stativ grob über den Bodenpunkt aufstellen (ggfls. mit Hilfe eines Schnurlotes).<br />
2. Korrigieren des Stativtellers, so dass sich dessen Mitte möglichst horizontal über<br />
dem Bodenpunkt befindet.<br />
3. Stativbeine fest in den Boden eintreten und das Instrument auf aus Stativ<br />
schrauben.<br />
4. Laserlot einschalten bzw. bei älteren Instrumenten durch das optische Lot<br />
schauen und durch Drehen der Fußschrauben den Laserpunkt oder das optische<br />
Lot auf den Bodenpunkt ausrichten.<br />
2
5. Einspielen der Libelle(n) durch Verändern der Stativbeine (Stativschrauben)!<br />
6. Feinhorizontierung mittels der Fußschrauben<br />
7. Durch vorsichtiges Lösen der Zentralschraube und Verschieben des Stativtellers<br />
den Bodenpunkt exakt einstellen.<br />
8. Zentralschraube wieder fest anziehen und die Horizontierung und Zentrierung<br />
nochmals überprüfen (ggfls. Schritte 6 und 7 Wiederholen)<br />
3
2.2 Horizontieren des Instrumentes<br />
Zur Horizontierung des Instruments dienen die Dosenlibelle und die Röhrenlibelle.<br />
Vor der eigentlichen Horizontierung ist der Spielpunkt der Libelle zu bestimmen.<br />
Die Grobhorizontierung erfolgt mittels der Dosenlibelle. Für die Feinhorizontierung<br />
wird die genauere Röhrenlibelle verwendet.<br />
Bei der Horizontierung werden zunächst zwei Fußschrauben gleichzeitig gegenläufig<br />
gedreht. Dabei gibt der Zeigefinger der rechten Hand die Richtung an, in die die<br />
Blase der Dosenlibelle laufen soll. Mit der dritten Fußschraube wird dann die Libelle<br />
zum Einspielen gebracht. Zur Kontrolle wird das Instrument um 180° gedreht und<br />
überprüft, ob der Spielpunkt richtig eingestellt wurde. Ein nicht richtig horizontiertes<br />
Instrument führt zu einem Stehachsfehler, der zusätzlich zu den anderen<br />
Achsfehlern des Instruments die Genauigkeit der Winkelmessung negativ<br />
beeinflusst.<br />
2.3 Instrumentenfehler<br />
Im Idealfall sollten bei einem horizontierten<br />
Instrument folgende Bedingungen erfüllt sein:<br />
a) Stehachse VV lotrecht<br />
b) Zielachse ZZ senkrecht zur Kippachse KK<br />
c) Vertikalkreisablesung im Zenit 0 Gon<br />
Sind diese Bedingungen nicht erfüllt, so<br />
spricht man von folgenden Fehlern:<br />
1) Stehachsfehler v<br />
2) Zielachsfehler (oder Kollimationsfehler) c<br />
3) Kippachsfehler i<br />
4) Höhenindexfehler Iz<br />
4
Instrumentenfehler des Theodolits (Tachymeter)<br />
Der Zielachs- und Kippachsfehler sind reine Instrumentenfehler und wirken sich in<br />
Abhängigkeit von der Zenitdistanz unterschiedlich auf die<br />
Horizontalrichtungsmessung aus. Diese beiden Fehler lassen sich aber durch die<br />
Messung in zwei Lagen eliminieren. Entsprechendes gilt auch für den<br />
5
Höhenindexfehler, der wie ein konstanter Fehler bei der Zenitdistanzmessung wirkt<br />
und der sich ebenfalls durch die Zweilagenmessung eliminieren lässt.<br />
Der Stehachsfehler ist kein wirklicher Instrumentenfehler sondern ein<br />
Aufstellungsfehler und wirkt sich ebenfalls zenitdistanzabhängig auf die<br />
Horizontalrichtungsmessung aus. Im Gegensatz zum Zielachs- und Kippachsfehler<br />
wird dieser Fehler jedoch nicht durch die Zweilagenmessung eliminiert. Die<br />
modernen Tachymeter sind heute aber in der Lage, die Stehachsschiefe mittels<br />
eines Zweiachskompensators automatisch zu korrigieren.<br />
2.4 Auswirkung der Instrumentenfehler auf die Horizontalwinkelmessung<br />
Bei der Messung in zwei Lagen wirken sich der Zielachs- und der Kippachsfehler<br />
wie folgt aus:<br />
fehlerfreie Werte (Sollwerte):<br />
Messwerte (fehlerbehaftet):<br />
RI<br />
RII = RI 200 Gon<br />
g<br />
RI g<br />
RII Ziel- und Kippachsfehler (zenitdistanzabhängig):<br />
(c) = c<br />
sin z<br />
(i) = i cot z<br />
a) Auswirkung des Zielachs- und des Kippachsfehlers<br />
Mittel aus Lage I und Lage II:<br />
g<br />
RI = RI + (c) + (i)<br />
g<br />
RII = RII − (c) − (I)<br />
RI,II = 1 2 (R<br />
g g<br />
I + RII<br />
200 Gon)<br />
= 1 2 (RI + (c) + (i) + RII − (c) − (i) 200 Gon)<br />
= 1 2 (RI + RI 200 Gon 200 Gon)<br />
= 1 2 (RI + RII)<br />
= RI<br />
6
Bei der Zweilagenmessung wird also sowohl der Zielachs- als auch der<br />
Kippachsfehler eliminiert.<br />
2.5 Bestimmung des Zielachs- und des Kippachsfehlers<br />
Beide Fehler wirken in Abhängigkeit von der Zenitsdistanz zum Zielpunkt aus.<br />
(c) = c<br />
sin z<br />
(i) = i cot z<br />
Beide Fehler wachsen also mit der Steilheit der Visuren, die nach Möglichkeit<br />
vermieden werden sollten.<br />
g<br />
RI = RI + (c) + (i)<br />
g<br />
RII = RII − (c) − (I)<br />
Bildet man nun folgende Differenz zwischen den Messungen aus Lage I und Lage II,<br />
so erhält man:<br />
Somit gilt:<br />
g g<br />
RI − RII<br />
200 Gon = RI + (c) + (i) 200 Gon − RII + (c) + (i)<br />
(c) + (i) = 1<br />
2 (R<br />
g g<br />
I − RII<br />
= RI 200 Gon − (RI 200 Gon) + 2 (c) + 2 (i)<br />
= 2 ((c) + (i))<br />
200 Gon)<br />
Für ein horizontales Ziel (z =100 Gon) gilt aber:<br />
(c) =<br />
c<br />
sin(100 Gon)<br />
= c<br />
(i) = i cot(100 Gon) = 0<br />
z = 100 Gon G c = 1 g g<br />
(R 2 I − RII<br />
200 Gon)<br />
Daher bestimmt man zunächst aus der Zweilagenmessung zu einem horizontalen<br />
Ziel den Zielachsfehler. Anschließend wird eine zweite Zweilagenmessung zu einem<br />
möglichst steilen Ziel (steile Visur) durchgeführt. Da der Zielachsfehler bereits zuvor<br />
bestimmt wurde, lässt sich der Kippachsfehler nun wie folgt bestimmen:<br />
7
(c) + (i) = 1 2 (R<br />
g g<br />
I − RII<br />
(i) = 1 2 (R<br />
g g<br />
I − RII<br />
i cot z = 1 2 (R<br />
g g<br />
I − RII<br />
200 Gon)<br />
200 Gon) − (c)<br />
200 Gon) − c<br />
sin z<br />
Durch eine weitere Umstellung erhält man schließlich:<br />
i = 1 2 (R<br />
g g<br />
I − RII<br />
i = 1 2 (R<br />
g g<br />
I − RII<br />
2.6 Der Höhenindexfehler<br />
200 Gon) − c<br />
sin z<br />
tan z<br />
200 Gon) tan z − c cos z<br />
Der Höhenindexfehler Iz resultiert aus dem Kompensatorfehler (bei älteren<br />
Theodoliten: Fehler der Höhenindexlibelle) und wirkt wie ein konstanter<br />
Ablesefehler, d.h. der Fehler wirkt auf alle Zenitdistanzmessungen in gleicher<br />
Weise:<br />
Z g = Z + Iz<br />
mit<br />
Z g : Messwert<br />
Z: fehlerfreier Wert (Sollwert)<br />
Für die Messung in zwei Lagen (Lage I: Index I; Lage II: Index II) gilt daher:<br />
g<br />
ZI = ZI + Iz<br />
g<br />
ZII = ZII + Iz<br />
wobei die Summe aus beiden Messungen im fehlerfreien Fall 400 Gon ergeben<br />
muss:<br />
ZI + ZII = 400 Gon G ZI = 400 Gon − ZII<br />
Die fehlerfreie Zenitdistanz aus Lage I und Lage II ergibt sich daher wie folgt:<br />
ZI,II = 1 2 (Z g g<br />
I + (400 Gon − ZII))<br />
= 1 2 (ZI + Iz + (400 Gon − (ZII + Iz)))<br />
= 1 2 (ZI + Iz + (400 Gon − (400 Gon − ZI + Iz)))<br />
= 1 2 (ZI + Iz + ZI − Iz)<br />
= ZI<br />
8
Der Höhenindexfehler lässt sich entsprechend bestimmen:<br />
Lösung:<br />
g g<br />
ZI + ZII − 400 Gon = ZI + Iz + ZII + Iz − 400 Gon<br />
= 2 Iz + ZI + (400 Gon − ZI) − 400 Gon<br />
= 2 Iz<br />
Iz = 1<br />
2 (Z<br />
g g<br />
I + ZII − 400 Gon)<br />
Bei der Zenitdistanz bestimmt man i.d.R. an Stelle des Höhenindexfehlers die<br />
Indexverbesserung vz. Fehler und Verbesserung unterscheiden sich nur durch das<br />
Vorzeichen, so dass hier folgendes gilt:<br />
vZ = −Iz<br />
vz = 1 2 (400<br />
g g<br />
Gon − ZI − ZII )<br />
Die fehlerfreien Messwerte für Lage I und Lage II lassen sich daher auch wie folgt<br />
bestimmen:<br />
g<br />
ZI = ZI + vz<br />
g<br />
ZII = ZII + vz<br />
Auf einem Standpunkt sollte der Höhenindexfehler bei den Zenitdistanzmessungen<br />
zu allen Zielpunkten konstant bleiben. Aus diesem Grunde wird i.d.R. bei der<br />
Ausgleichung der Zenitdistanzmessungen (mehrere Sätze) für jeden Standpunkt<br />
aus allen Messungen eine gemeinsame Höhenindexverbesserung (Mittelwert aus<br />
allen Zweilagenmessungen) berechnet und aus den Abweichungen der Einzelwerte<br />
vom Mittelwert hieraus die Standardabweichung für eine Zenitdistanzmessung<br />
bestimmt.<br />
2.7 Allgemeine Hinweise<br />
Sämtliche Instrumentenfehler ändern sich mit der Temperatur. Weitere<br />
Einflußfaktoren, die eine Änderung der Instrumentenfehler hervorrufen können, sind<br />
Vibrationen und Stöße beim Transport. Wenn nur in einer Fernrohrlage gemessen<br />
wird, sind diese Fehler daher unbedingt vor der Messung zu bestimmen und im<br />
Gerät abzuspeichern, damit diese bei der anschließenden Winkelmessung<br />
rechnerisch berücksichtigt werden können. Messungen zu Zielen, die eine steile<br />
Visur erfordern, sind grundsätzlich in zwei Lagen zu durchzuführen.<br />
9
2.8 Herleitung des Einflusses der Achsfehler auf die Winkelmessung<br />
a) Zielachsfehler c<br />
Der Zielachsfehler c ist darauf zurückzuführen, dass die Zielachse nicht rechtwinklig<br />
zur Kippachse ausgerichtet ist. Bei einem Ziel im Horizont wirkt exakt der Fehler c.<br />
horizontales Ziel<br />
c<br />
c<br />
Lage I<br />
Kippachse<br />
Lage II<br />
nach Durchschlagen<br />
Kippachse<br />
Lage I<br />
horizontales Ziel<br />
c<br />
cc<br />
Lage II nach Durchschlagen<br />
und Drehung um 200 Gon<br />
In Lage I wirkt daher bei einem horizontalen Ziel der Ziealachsfehler in der Form:<br />
g<br />
RI = RI + c<br />
Nach Durchschlagen des Fernrohrs und anschließender Drehung um 200 Gon wirkt<br />
der Zielachsfehler aber mit umgekehrtem Vorzeichen in der Form:<br />
g<br />
RII = RII − c<br />
Das Mittel aus einer Zweilagenmessung ist daher frei von dem Zielachsfehler.<br />
Der Einfluss des Zielachsfehlers (c) ändert sich jedoch mit der Zenitdistanz z. Die<br />
Herleitung des Einflusses des Zielachsfehlers (c) auf die Horizontalwinkelmessung<br />
zeigt folgende Abbildung.<br />
10
=LHO<br />
K.A.<br />
Zielachsfehler c und sein Einfluss (c)<br />
Vertikalebene<br />
F<br />
Ablesestelle am<br />
Horizontalkreis<br />
F<br />
]<br />
F<br />
]<br />
Zenit<br />
sphärisches Dreieck<br />
Horizontalkreis<br />
Horizontalebene<br />
K.A.<br />
Betrachtung des sphärischen Dreiecks auf der Kugel (Radius R=1)<br />
]<br />
F<br />
F<br />
]<br />
100 Gon<br />
Zenit<br />
gegeben: 3 Seiten auf der Kugel<br />
y z<br />
y z<br />
y c<br />
y rechter Winkel (100 Gon)<br />
gesucht: Winkel (c)<br />
sphärische Trigonometrie:<br />
sin(c) sin(100 Gon)<br />
= =<br />
sin c sin z<br />
1<br />
sin z<br />
sin(c) =<br />
sin c<br />
sin z<br />
kleine Winkel : (c) = c<br />
sin z<br />
11<br />
z = 100 Gon G (c) = c<br />
z = 50 Gon G 2 c
) Kippachsfehler i<br />
Der Kippachsfehler i ist darauf zurückzuführen, dass die Kippachse nicht<br />
rechtwinklig zur Stehachse ausgerichtet ist.<br />
Stehachse<br />
Lage Ii i<br />
Lage I<br />
Ziel<br />
Kippachse<br />
Kippachse<br />
Stehachse<br />
Lage II<br />
Lage II<br />
nach Drehen um 200 Gon<br />
und Duchschlagen<br />
Ziel<br />
Bei einem horizontalen Ziel wirkt sich der Kippachsfehler i daher zunächst nicht aus.<br />
Erst bei einem Ziel oberhalb- oder unterhalb des Horizonts wirkt der Kippachsfehler<br />
(i), da das Fernrohr nicht mehr in einer Vertikalebene sondern in einer um den<br />
Winkel i verkippten Ebene bewegt wird. Da die Kippung der Zielachse nach einer<br />
Drehung des Theodolits um 200 Gon in Bezug auf das Ziel in die andere Richtung<br />
zeigt, wirkt in Lage II der Kippachsfehler (i) mit umgekehrtem Vorzeichen und fällt<br />
daher bei einer Zweilagenmessung heraus.<br />
g<br />
RI = RI + (i)<br />
g<br />
RII = RII − (i)<br />
Im Felde kann der Kippachsfehler bereits durch einfaches Anzielen, z.B. einer<br />
senkrechten Gebäudekante überprüft und erkannt werden.<br />
Fadenkreuz<br />
Anzielung einer<br />
Gebäudekante<br />
mit einem<br />
Theodolit<br />
Die Herleitung des Einflusses des Kippachsfehler (i) in Abhängigkeit von der<br />
Zenitdistanz z auf die Horizontalwinkelmessung zeigt nachfolgende Abbildung.<br />
12
=LHO<br />
K.A.<br />
¡<br />
¢¡<br />
L<br />
Kippachsfehler i und sein Einfluss (i)<br />
Vertikalebene<br />
*RQ<br />
Ablesestelle am<br />
Horizontalkreis<br />
L<br />
sphärisches Dreieck<br />
100Gon-z<br />
L<br />
Zenit<br />
z<br />
Horizontalkreis<br />
Horizontalebene<br />
um i verkippte<br />
Vertikalebene<br />
K.A.<br />
Betrachtung des sphärischen Dreiecks auf der Kugel (Radius R=1)<br />
¤<br />
£¥¤<br />
L<br />
*RQ<br />
*RQ ] L<br />
]<br />
Zenit<br />
13<br />
gegeben: 3 Seiten auf der Kugel<br />
y 100 Gon<br />
y 100 Gon-z<br />
y z<br />
y Winkel i<br />
gesucht: Winkel (i)<br />
sphärische Trigonometrie:<br />
sin(i)<br />
sin(100 Gon − z)<br />
cos z<br />
G sin(i) = sin i<br />
= sin i<br />
sin z<br />
cos z<br />
sin z<br />
= sin i cot z<br />
kleine Winkel G (i) £ i cot z<br />
z = 100 Gon G (i) = 0
c) Stehachsfehler V<br />
Der Stehachsfehler V ist ein Aufstellungsfehler. Die Vertikalachse ist nicht parallel<br />
zur Lotrichtung. Die Kippachse, die senkrecht zur Lotrichtung ausgerichtet ist, ist<br />
daher zur Horizontalebene gekippt, d.h. der Stehachsfehler wirkt ähnlich wie der<br />
Kippachsfehler. Im Gegensatz zum Kippachsfehler bleibt aber die Neigung der<br />
Stehachse und daher auch die Neigung der Kippachse raumfest, da der Theodolit<br />
um die geneigte Stehachse gedreht wird.<br />
Stehachse<br />
Lage IV<br />
Lage I<br />
Zenit<br />
V<br />
Ziel<br />
Kippachse<br />
V<br />
Lage II<br />
Zenit Stehachse<br />
Ziel senkrecht zur Richtung der Stehachsneigung<br />
Ziel<br />
Kippachse<br />
100 Gon 100 Gon<br />
Lage II<br />
nach Drehen um 200 Gon<br />
und Duchschlagen<br />
Der Einfluss des Stehachsfehlers wird maximal senkrecht zur Richtung der<br />
Stehachsneigung und wirkt dann wie ein Kippachsfehler - allerdings mit dem<br />
Unterschied, dass in Lage II das Vorzeichen nicht wechselt. Der Stehachsfehler wird<br />
daher nicht durch die Zweilagenmessung eliminiert Liegt das Ziel in Richtung der<br />
Stehachsneigung, so bleibt ist der Einfluss des Stehachsfehlers auf die<br />
Winkelmessung null.<br />
Lage IV<br />
Lage I<br />
Zenit<br />
V<br />
Stehachse<br />
Kippachse<br />
Ziel<br />
Ziel in Richtung der Stehachsneigung<br />
V<br />
14<br />
Lage II<br />
V<br />
Zenit Stehachse<br />
V<br />
Kippachse<br />
Lage II<br />
nach Drehen um 200 Gon<br />
und Duchschlagen<br />
Ziel
Der Einfluss der Stehachsneigung (V) auf die Horizontalwinkelmessung lässt sich<br />
daher wie folgt berechnen:<br />
(v) = v sin( − 0) cot z<br />
(1)<br />
α0: Richtung der Stehachsneigung (in Lage I)<br />
α: Richtung zum Ziel (in Lage I)<br />
Richtung der<br />
Stehachsneigung<br />
Zenit<br />
Stehachse<br />
Ziel<br />
Zweiachskompensator<br />
y<br />
Moderne digitale Theodolite verfügen heute über einen Zweiachskompensator<br />
(Flüssigkeitskompensator), der die Neigung der Stehachse in zwei senkrecht<br />
zueineinder stehenden Richtungen erfasst und dann nach (1) rechnerisch an die<br />
Messungen anbringt. Die Neigung V und die Richtung der Neigung α0 wird aus den<br />
beiden Neigungswerten Vx und Vy wie folgt berechnet:<br />
v = v x 2 + vy 2<br />
0 = arctan vy<br />
vx<br />
Die Neigung darf allerdings nicht größer sein, als der Messbereich des<br />
Kompensators, i.d.R. 1’ bis 3’. Wird dieser Bereich überschritten, erfolgt keine<br />
Winkelmessung mehr bzw. das Instrument zeigt einen Fehler an (z.B. Tilt).<br />
Zur Bestimmung des Zielachs- und des Kippachsfehlers gibt es ebenfalls<br />
entsprechende Programme, die aus den Zweilagenmessungen zu mehreren Zielen<br />
diese Fehler berechnen und bei der späteren Winkelmessung ebenfalls rechnerisch<br />
berücksichtigen. Dennoch sollte bei Zielen, die eine steile Visur erfordern, unbedingt<br />
die Messung in beiden Fernrohrlagen erfolgen.<br />
15<br />
x
2.9 Horizontalwinkelmessung<br />
Die Horizontalwinkelmessung erfolgt in Voll- oder Halbsätzen zu zwei oder mehreren<br />
Zielen.<br />
y Halbsatz: Messung nur in einer Fernrohrlage<br />
y Vollsatz: Messung in beiden Fernrohrlagen<br />
Halbsätze sind nur zulässig bei<br />
y geringen Genauigkeitsanforderungen (cgon)<br />
y bei horizontalen Zielen<br />
y bei Zielen mit gleicher Zenitdistanz.<br />
Ziel 4<br />
Ziel s<br />
Ziel 3<br />
Standpunkt<br />
Ziel 1<br />
Ziel 2<br />
Die Anzahl der Sätze richtet sich nach der Genauigkeit des Theodoliten und der<br />
Genauigkeitsanforderung an die Winkelmessung. Vor Beginn der<br />
Satzwinkelmessung sind daher folgende Vorgaben festzulegen:<br />
n: Anzahl der Sätze<br />
s: Anzahl der zu beobachtenden Ziele<br />
Das erste Ziel sollte ein gut sichtbares und gut einzustellendes Ziel sein, da auf<br />
diese Richtung alle anderen Richtungen später reduziert werden. Die Durchführung<br />
der Winkelmessung erfolgt dann nach Horizontierung des Instruments über dem<br />
Standpunkt in folgenden Schritten:<br />
1. Lage I: Ziel 1, Ziel 2, Ziel 3, ...., Ziel s<br />
2. Lage II: Ziel s, Ziel s-1, Ziel s-2, ..., Ziel 1<br />
3. Überprüfung der Horizontierung und ggf. Nachhorizontieren des Instruments<br />
4. nächster Satz, Lage I wie 1., dann Lage II wie 2. usw.<br />
16
Durch die Reihenfolge 1, 2, 3,... s bzw. s, s-1, s-2,..., 1 soll ein zwischenzeitliches<br />
(gleichmäßiges) Einsinken des Instruments kompensiert werden.<br />
Die Feldbuchführung sowie die Auswertung der Messungen wird nachfolgend<br />
beschrieben.<br />
Feldbuch Winkelmessung<br />
Standpunkt<br />
Zielpunkt<br />
Ablesung<br />
Lage I<br />
AI<br />
Ablesung<br />
Lage II<br />
AII<br />
reduzierte<br />
Ablesung<br />
Lage I<br />
RI<br />
reduzierte<br />
Ablesung<br />
Lage II<br />
RII<br />
Satzmittel<br />
aus<br />
Lage I, II<br />
RI,II<br />
Gesamtmittel<br />
_<br />
R<br />
Feldbuchauswertung: ( s: Anzahl der Strahlen, n: Anzahl der Sätze):<br />
Diff.<br />
zum<br />
Mittel<br />
d<br />
Verbess.<br />
Die Ergebnisse sind geodätisch zu runden, wobei bei den Richtungsmessungen<br />
maximal 4 Nachkommastellen (cc) zu notieren sind (Ablesegenauigkeit).<br />
Satzweise Berechnungen:<br />
1. Reduzierung der einzelnen Richtungen auf 1. Richtung:<br />
RIi = AIi − AI1 ; RIIi = AIIi − AIIi ; i = 1, s<br />
1. Summenprobe: [RI] = [AI] − s AI1; [RII] = [AII] − s AII1;<br />
2. Berechnung der Satzmittel:R I,IIi = 1<br />
2 (R Ii + R IIi); i = 1, s<br />
2. Summenprobe:[AI] + [AII] = 2 [RI,II] + s (AI1 + AII1)<br />
Mittel aus allen Sätzen:<br />
n<br />
Ri = 1 n j=1<br />
RI,IIi ; i = 1, s<br />
3. Summenprobe:n R = [RI,II]<br />
Berechnung der Verbesserungen:<br />
(Herleitung s. Ausgleichung von Horizontalrichtungsmessungen)<br />
k k<br />
Differenz d zum Gesamtmittel: di = Ri − RI,IIi Mittel der Differenzen pro Satz: d k<br />
n<br />
= 1 s j=1<br />
d j k ; k = 1, n<br />
Verbesserungen: v i k = di k − d k<br />
; k = 1, n; i = 1, s<br />
17<br />
v<br />
vv
Berechnung der Standardabweichungen:<br />
Standardabweichung einer Einzelrichtung (Lage I,II gemittelt):<br />
SR =<br />
vv<br />
(n−1) (s−1)<br />
Standardabweichung der aus n-Sätzen gemittelten Richtung:<br />
S R = SR<br />
n =<br />
vv<br />
n (n−1) (s−1)<br />
Die Summenproben dienen zur Verprobung der reduzierten und gemittelten<br />
Beobachtungen und werden nur an Hand der letzten Stelle (mgon bei<br />
Ingenieurtheodolit, cc bei Feinmesstheodolit) vollzogen und kontrolliert!<br />
2.10 Zenitdistanzmessung<br />
Die Zenitdistanz bzw. der Zenitwinkel ist der Winkel zwischen dem Zenit und dem<br />
Zielpunkt (definiert durch die Zielachse des Fernrohrs) in der Vertikalebene zum<br />
Ziel. Der Zenit ist durch die Lotrichtung des Standpunktes definiert.<br />
i<br />
Zenit<br />
Lotrichtung<br />
z<br />
Zenitdistanzmessung<br />
s<br />
sh<br />
Zieltafel<br />
Der Zenitwinkel Z wird zur Berechnung der Horizontalstrecke sh aus der<br />
gemessenen Schrägstrecke s sowie zur Berechnung des Höhenunterschiedes Δh<br />
benötigt:<br />
18<br />
t<br />
Δh
sh = s sin z<br />
h = sh cot z + i − t<br />
h = s cos z + i − t<br />
s: gemessene Schrägstrecke<br />
i: Kippachshöhe des Theodolits<br />
t: Tafelhöhe des Zielpunktes<br />
Für eine horizontale Visur gilt: Lage I: Z =100 Gon; Lage 2: Z = 300 Gon<br />
Entsprechend gilt für ein Ziel im Zenit: Lage I: Z = 0 Gon; Lage II: Z = 200 Gon<br />
Bei längeren Entfernungen ist unbedingt die Strahlkrümmung (wegen Refraktion)<br />
und die Erdkrümmung zu berücksichtigen.<br />
Zenit Zenit<br />
Lotrichtung<br />
R<br />
Erdkrümmung<br />
b<br />
z<br />
Δ<br />
R<br />
Lotrichtung<br />
Wegen der Erdkrümmung sind die beiden Lotrichtungen von zwei Punkten im<br />
Abstand b auf der Erdoberfläche nicht mehr parallel. Die durch den Abstand b<br />
resultierende Winkeldifferenz Δz lässt sich wie folgt abschätzen:<br />
z = b<br />
R -<br />
Beispiele (für R = 6371 km):<br />
b = 100 m G z = 1 mGon<br />
b = 200 m G z = 2 mGon<br />
b = 500 m G z = 5 mGon<br />
19
Die Beispiele zeigen, dass bereits ab 200 m Entfernung für<br />
Genauigkeitsanforderungen von 1 mGon bis 2 mGon die Erdkrümmung nicht mehr<br />
zu vernachlässigen ist.<br />
Die Messung der Zenitwinkel erfolgt mittels des Vertikalkreises, der i.d.R. kleiner als<br />
der Horizontalkreis ist, da die Genauigkeit der Vertikalwinkelmessung gegenüber der<br />
Horizontalwinkelmessung ohnehin geringer ist. Der Grund hierfür ist die Refraktion,<br />
die wegen der vertikalen Schichtung der Erdatmosphäre die Vertikalwinkelmessung<br />
erheblich mehr als die Horizontalwinkelmessung (Seitenrefraktion) beeinflusst.<br />
Im Gegensatz zum Horizontalkreis, der bei Drehung des Theodolits um die<br />
Stehachse fest bleibt, dreht der Vertikalkreis bei Drehung des Fernrohrs um die<br />
Kippachse mit, da der Vertikalkreis fest mit der Kippachse verbunden ist. Die<br />
Ablesevorrichtung des Vertikalkreises ist daher fest mit der Stütze verbunden und<br />
wird durch eine spezielle Libelle, die sog. Höhenindexlibelle, bzw. durch einen<br />
speziellen Kompensator parallel zur Lotrichtung ausgerichtet. Die Höhenindexlibelle<br />
ist viel genauer als die zur Horizontierung der Theodolits benutzten Libellen.<br />
Bei den älteren Theodoliten muss die Höhenindexlibelle (wie bei einem<br />
Libellennivellier) noch bei jeder einzelnen Zenitdistanzmessung manuell eingespielt<br />
werden. Hierzu dient eine Einstellschraube mit einer besonderen Riffelung. Bei<br />
neueren Theodoliten sorgt ein automatischer Kompensator (automatischer<br />
Höhenindex) für die Ausrichtung. Der Fehler des Kompensators bzw. der Fehler der<br />
Libelle wird als Höhenindexfehler (oder einfach Indexfehler) bezeichnet und<br />
20
eeinflusst sämtliche Zenitdistanzmessungen in gleicher Weise, der daher durch<br />
eine Zweilagenmessung eliminiert werden kann.<br />
Auswirkung der Höhenindexfehlers:<br />
a) fehlerfreier Fall:<br />
0<br />
Lage I Lage II<br />
100<br />
300<br />
200<br />
fehlerfreie Ablesungen für ein Ziel im Horizont:<br />
Lage I: Lage II:<br />
ZI = 100 Gon ZII = 300 Gon<br />
Mittel aus Lage I und II:<br />
0<br />
100<br />
300<br />
200<br />
ZI + ZII = 400 Gon G ZI = 400 Gon − ZII<br />
Z I,II = 1<br />
2 (ZI + (400 Gon − ZII))<br />
a) Ablesungen im Falle eines Höhenindexfehlers Iz:<br />
Lage I<br />
0<br />
100<br />
300<br />
200<br />
g<br />
Lage I: ZI = ZI + Iz<br />
Lage II:<br />
Ix<br />
21<br />
0<br />
100<br />
300<br />
g<br />
ZII = ZII + Iz<br />
Lage II<br />
200
Mittel aus Lage I und II:<br />
ZI,II = 1 2 (Z g g<br />
I + (400 Gon − ZII))<br />
= 1 2 (ZI + Iz + (400 Gon − (ZII + Iz)))<br />
= 1 2 (ZI + Iz + (400 Gon − (400 Gon − ZI + Iz)))<br />
= 1 2 (ZI + Iz + ZI − Iz)<br />
= ZI<br />
Der Mittelwert aus einer in Lage I und Lage II gemessenen Zenitdistanz ist frei von<br />
dem Einfluss des Höhenindexfehlers. Der Höhenindexfehler lässt sich ebenfalls<br />
bestimmen:<br />
Lösung:<br />
g g<br />
ZI + ZII − 400 Gon = ZI + Iz + ZII + Iz − 400 Gon<br />
= 2 Iz + ZI + (400 Gon − ZI) − 400 Gon<br />
= 2 Iz<br />
Iz = 1<br />
2 (Z<br />
g g<br />
I + ZII − 400 Gon)<br />
Bei der Zenitdistanz bestimmt man i.d.R. an Stelle des Höhenindexfehlers die<br />
Indexverbesserung vz. Fehler und Verbesserung unterscheiden sich nur durch das<br />
Vorzeichen, so dass hier folgendes gilt:<br />
vZ = −Iz<br />
vz = 1 2 (400<br />
g g<br />
Gon − ZI − ZII )<br />
Die fehlerfreien Messwerte für Lage I und Lage II lassen sich daher auch wie folgt<br />
bestimmen:<br />
g<br />
ZI = ZI + vz<br />
g<br />
ZII = ZII + vz<br />
Auf einem Standpunkt sollte der Höhenindexfehler bei den Zenitdistanzmessungen<br />
zu allen Zielpunkten konstant bleiben. Aus diesem Grunde wird i.d.R. bei der<br />
Ausgleichung der Zenitdistanzmessungen (mehrere Sätze) für jeden Standpunkt<br />
aus allen Messungen eine gemeinsame Höhenindexverbesserung (Mittelwert aus<br />
allen Zweilagenmessungen) berechnet und aus den Abweichungen der Einzelwerte<br />
vom Mittelwert hieraus die Standardabweichung für eine Zenitdistanzmessung<br />
bestimmt.<br />
22
Feldbuch zur Zenitdistanzmessung<br />
Standpunkt<br />
1<br />
i=1,41<br />
1<br />
i=1,41<br />
Zielpunkt<br />
2<br />
t =1,26<br />
nächstes Ziel<br />
3<br />
t =1,84<br />
Ablesung<br />
Lage I<br />
AI<br />
103,546<br />
103,548<br />
103,549<br />
103,545<br />
...<br />
...<br />
...<br />
...<br />
Ablesung<br />
Lage II<br />
AII<br />
296,446<br />
296,444<br />
296,445<br />
296,445<br />
...<br />
...<br />
...<br />
...<br />
I + II<br />
vZ<br />
399,991<br />
0,004<br />
399,992<br />
0,004<br />
399,994<br />
0,003<br />
399,990<br />
0,005<br />
...<br />
...<br />
...<br />
...<br />
2Z =<br />
I - II<br />
+ 400<br />
207,101<br />
207,104<br />
207,101<br />
207,100<br />
...<br />
...<br />
...<br />
...<br />
Satzmittel<br />
aus<br />
Lage I, II<br />
Z<br />
103,550<br />
103,552<br />
103,552<br />
103,550<br />
...<br />
...<br />
...<br />
...<br />
Gesamtmittel<br />
_<br />
Z<br />
103,551<br />
...<br />
...<br />
...<br />
...<br />
Mittel<br />
Index<br />
_<br />
...<br />
...<br />
...<br />
...<br />
4<br />
Verbess.<br />
Jedes Ziel wird zunächst einzeln mit der vorher festgelegten Anzahl von Sätzen<br />
gemessen. Am Ende aller Messungen wird überprüft, ob der Höhenindexfehler für<br />
alle Ziele konstant geblieben ist. Wenn dieses der Fall ist, werden die<br />
Indexverbesserungen aller Ziele für diesen Standpunkt gemeinsam gemittelt. Ist<br />
jedoch erkennbar, dass der Indexfehler für jedes Ziel unterschiedlich ist, müssen die<br />
Indexverbesserungen für jedes Ziel einzeln gemittelt werden.<br />
Berechnungen pro Strahl:<br />
Indexabweichung: vzi = 400 gon − (AI i + AII i )<br />
2 i = 1, n n : Anzahl der S ä tze<br />
Zenitdistanz: zi = AI i − AII i + 400 gon<br />
2<br />
Mittel: z = 1 n<br />
n<br />
i=1 Zi, i = 1, n<br />
Summenprobe: n z = [z] = [AI] + [vz]<br />
Berechnung der Standardabweichungen unter Verwendung der berechneten<br />
Indexabweichung aus allen Sätzen und allen Zielen (Gesamtanzahl: m):<br />
mittlere Indexabweichung: vz = 1 m<br />
m<br />
i=1 Zi<br />
Verbesserungen: vi = v z − vzi<br />
23<br />
vZ<br />
v<br />
...<br />
...<br />
...<br />
...<br />
0<br />
0<br />
1<br />
-1<br />
vv<br />
...<br />
...<br />
...<br />
...<br />
0<br />
0<br />
1<br />
1
Standardabweichung der Indexabweichung und einer aus Lage I und II gemittelten<br />
Zenitdistanz:<br />
svz = sz =<br />
vv<br />
m−1<br />
Standardabweichung einer aus n-Sätzen gemittelten Zenitdistanz<br />
sz = sZ<br />
n<br />
Falls die einzelnen Ziele mit einer unterschiedlichen Anzahl von Sätzen bestimmt<br />
wurden, sind für n die individuellen Werte einzusetzen.<br />
2.11 Repetitionswinkelmessung<br />
Die Repetitionswinkelmessung ist ein spezielles Winkelmessverfahren, das<br />
insbesondere bei Ingenieurtheodoliten (mittlere Genauigkeit) zur<br />
Horizontalwinkelmessung zwischen zwei Zielen eingesetzt werden kann (z.B.<br />
Basislattenmessung, Polygonwinkelmessung). Voraussetzung ist allerdings, dass<br />
diese Theodolite über eine Teilkreisklemme verfügen. Mit diesem Verfahren kann<br />
auf diese Weise gegenüber der reinen Satzwinkelmessung eine deutliche<br />
Genauigkeitssteigerung erzielt werden, wenn die Zieleinstellgenauigkeit σZ des<br />
Instruments höher als die Ablesegenauigkeit σA des Teilkreises ist.<br />
Dieses ist z.B. bei den Ingenieurtheodoliten der Fall:<br />
Zieleinstellgenauigkeit: "Z ¢ 0.3 mGon ... 0.5 mGon<br />
Ablesegenauigkeit des Teilkreises: "A ¢ 1.0 mGon ... 2.0 mGon<br />
Die Genauigkeit einer Richtungsmessung σR hängt also im wesentlichen von der<br />
Ablesegenauigkeit der Teilkreises ab:<br />
"R = " A 2 + "Z 2<br />
Bei der Satzwinkelmessung muss jedes n-mal Ziel eingestellt und n-mal abgelesen<br />
werden. Eine Genauigkeitssteigerung wäre möglich, wenn die Anzahl der<br />
Ablesungen reduziert werden könnte. Genau dieses bezweckt die<br />
Repetitionswinkelmessung, in dem der Winkel mit Hilfe der Teilkreisklemme<br />
mechanisch aufaddiert und anschließend rechnerisch gemittelt wird. Die<br />
Teilkreisklemme ermöglicht das Festklemmen des Unterbaus (Limbus) mit der<br />
Alhidade. Beim Drehen des Theodoliten um die Stehachse dreht dann der<br />
Horizontalkreis mit, d.h. die Ablesestelle am Teilkreis ändert sich nicht.<br />
Durchführung der Repetitionswinkelmessung:<br />
a) Festlegung der Anzahl der Repetitionen n<br />
b) Durchführung der n-Repetitionen nach folgendem Muster:<br />
24
P 1<br />
P 1<br />
340<br />
380<br />
360<br />
320<br />
60<br />
40<br />
0 20<br />
300<br />
80<br />
380<br />
0 20<br />
100<br />
40<br />
60<br />
80<br />
Repetition 1<br />
280<br />
120<br />
260<br />
140<br />
240<br />
160<br />
Repetition 2<br />
360<br />
340<br />
320<br />
100<br />
220<br />
300<br />
180<br />
120<br />
200<br />
200<br />
1. Schritt: Ziel P1 einstellen und<br />
erste Ablesung R1 tätigen:<br />
R1 = 10,000 Gon<br />
2. Schritt: Ziel P2 einstellen und<br />
Teilkreis nur grob ablesen<br />
(auf cGon): R*2=90,0 Gon<br />
3. Schritt: Teilkreis bei Punkt<br />
P2 klemmen und<br />
anschliessend P1 wieder<br />
einstellen.<br />
4. Schritt: Teilkreis bei Punkt<br />
P1 lösen und anschliessend<br />
P2 wieder einstellen.<br />
5. Schritt: Teilkreis bei Punkt<br />
P2 klemmen und<br />
anschliessend P1 wieder<br />
einstellen.<br />
6. Schritt: Teilkreis bei Punkt<br />
P1 lösen und anschliessend<br />
P2 wieder einstellen.<br />
7. Schritt 5 und 6 solange wiederholen, bis dass die gewünschte Anzahl an<br />
Repetitionen erreicht ist. Die Repetition endet immer am Punkt P2, der dann<br />
n-mal eingestellt werden muss. Am Ziel P2 erfolgt dann die zweite endgültige<br />
Ablesung R2.<br />
In dem oben gezeigten Beispiel wurden bisher zwei Repetitionen durchgeführt. Die<br />
nächsten beiden Repetionen sind in der nachfolgenden Grafik aufgeführt.<br />
140<br />
180<br />
220<br />
260<br />
280<br />
25<br />
160<br />
240<br />
P 2<br />
P 2
P 1<br />
100<br />
140<br />
120<br />
80<br />
160<br />
60<br />
180<br />
40<br />
200<br />
220<br />
240<br />
Repetition 3<br />
0 20<br />
260<br />
380<br />
280<br />
300<br />
340<br />
360<br />
320<br />
P 2<br />
P 1<br />
180<br />
220<br />
200<br />
160<br />
240<br />
140<br />
260<br />
120<br />
280<br />
100<br />
300<br />
80<br />
320<br />
Repetition 4<br />
Nach der vierten Repetition erfolgt die endgültige Ablesung R2, hier: R2 = 330,000<br />
Gon. Auf diese Weise wurde der Winkel viermal mechanisch aufaddiert, wobei nur<br />
zweimal der Teilkreis abgelesen wurde (die Grobablesung zählt nicht).<br />
w = 1 n (R2 − R1)<br />
= 1 4<br />
(330, 000 Gon − 10, 000 Gon)<br />
= 80, 0000 Gon<br />
n = 4 Repetitionen<br />
Würden zwei weitere Repetitionen durchgeführt, ergäbe sich folgende Situation:<br />
P 1<br />
Überschreitung<br />
der Nullstelle des<br />
Teilkreises!<br />
260<br />
300<br />
280<br />
240<br />
320<br />
220<br />
340<br />
200<br />
360<br />
180<br />
380<br />
Repetition 5<br />
160<br />
0 20<br />
140<br />
40<br />
60<br />
100<br />
120<br />
80<br />
P 2<br />
P 1<br />
26<br />
340<br />
380<br />
360<br />
320<br />
0 20<br />
300<br />
280<br />
40<br />
60<br />
80<br />
Repetition 6<br />
260<br />
240<br />
340<br />
60<br />
220<br />
40<br />
100<br />
360<br />
120<br />
200<br />
380<br />
140<br />
180<br />
0 20<br />
160<br />
P 2<br />
P 2
Bereits bei der 5. Repetition wird die Nullstelle des Teilkreises überschritten, und<br />
nach der 6. Repetition wird für R2 = 90,000 Gon abgelesen. Die richtige Ablesung<br />
wäre aber 490,000 Gon gewesen. Bei jedem Überschreiten der Nullstelle gehen<br />
also 400 Gon verloren, so dass die Berechnung des Mittelwertes wie folgt lauten<br />
muss:<br />
w = 1 n (R2 − R1 + x 400 Gon)<br />
= 1 6<br />
= 1 6<br />
(90, 000 Gon − 10, 000 Gon + 1 400 Gon)<br />
480, 000 Gon<br />
= 80, 0000 Gon<br />
n = 6 Repetitionen<br />
Der Wert x für die Anzahl der Überschreitungen der Nullstelle (hier x = 1) wird aus<br />
der ersten Grobablesung abgeschätzt. In diesem Beispiel:<br />
w 0 = R 2<br />
− R1<br />
= 90, 0 Gon − 10, 000 Gon = 80 Gon<br />
G 6 w 0 £ 480, 0 Gon<br />
In der Nähe des Näherungswertes w muss der gesuchte Wert liegen. An Hand<br />
dieses Näherungswertes lässt sich leicht der Wert x abschätzen.<br />
Abschätzung des Genauigkeitsgewinns der Repetitionswinkelmessung mit<br />
n-Repetitionen gegenüber einer herkömmlichen Satzwinkelmessung in n- Sätzen:<br />
a) Satzwinkelmessung<br />
Bei der Satzwinkelmessung in n-Sätzen wird jedes Ziel n-mal eingestellt und n-mal<br />
der Teilkreis abgelesen. Aus den Richtungen zu den beiden Zielen werden die<br />
einzelnen Winkel berechnet, dann aufsummiert und anschliessend gemittelt werden.<br />
Berechnungsformeln:<br />
wi = R2i − R1i, i = 1, 2, ..., n<br />
w = 1 n<br />
n<br />
i=1<br />
wi = 1 n<br />
n<br />
i=1<br />
(R2i − R1i )<br />
Standardabweichungen (quadratische Fehlerfortpflanzung):<br />
" R 2 = "A 2 + "Z 2<br />
" w 2 = 2 "R 2 = 2 (" A 2 + "Z 2 )<br />
" w 2 = n<br />
1<br />
n 2 (" w 2 ) = 2 n (" A 2 + "Z 2 )<br />
27
"A = 2 mGon<br />
"Z = 0.3 mGon<br />
n = 4<br />
Beispiel: (einfache Satzwinkelmessung in n-Sätzen)<br />
"w = 2 n ("<br />
2 2<br />
A + "Z )<br />
= 2 4 (4 + 0.09)mGon 2<br />
= 1.43 mGon<br />
b) Repetitionswinkelmessung in n-Repetitionen:<br />
Die beiden Zielpunkte wurden jeweils n-mal eingestellt, aber nur jeweils einmal<br />
abgelesen. Anschließend wurde der mechanisch aufsummierte Winkel gemittelt. Bei<br />
Anwendung der quadratischen Fehlerfortpflanzung ergibt sich daher:<br />
"A = 2 mGon<br />
"Z = 0.3 mGon<br />
n = 4<br />
2 2 2<br />
"<br />
wsum = 2 n " Z + 2 "A<br />
2<br />
"<br />
w =<br />
1<br />
n2 " 2<br />
wsum = 1 n2 (2 2 2 n " Z + 2 "A )<br />
= 2 n 2 (n " Z 2 + "A 2 )<br />
Beispiel: 2<br />
(Repetitionswinkelmessung, 4 Rep.)<br />
" w =<br />
=<br />
n 2 (" A 2 + n "Z 2 )<br />
2<br />
16 (4 + 4 0.09)mGon 2<br />
= 0.74 mGon<br />
Der Genauigkeitsgewinn ist hier also 0.74 mGon gegenüber 1.43 mGon!<br />
Mit dieser Methode werden auch Teilkreisfehler eliminiert, da nur zwei Ablesungen<br />
erforderlich sind.<br />
28
3 Polygonieren<br />
Das Polygonieren dient zum Ziwschenschalten von Aufnahme- und Festpunkten in<br />
ein bestehendes Netz von Punkten (meist übergeordnetes Netz) mittels Richtungsund<br />
Streckenbeobachtungen (Tachymeter), wobei von folgenden Punktabständen<br />
bzw. Seitenlängen auszugehen ist:<br />
y Grundlagenetze: bis 50 km<br />
y Netzverdichtung: 0.4 km ... 2.5 km<br />
y Aufnahmepunkte (AP): 500 m ... 1000 m<br />
Der Begriff leitet sich aus Poly = viel und Gon = Winkel ab und bedeutet<br />
unregelmäßiges Vieleck. In der Geodäsie ist unter diesem Begriff i.d.R. ein<br />
langgestreckter Zug zwischen zwei koordinatenmäßig bekannten Punkten gemeint,<br />
wobei folgende Arten möglich sind:<br />
y einseitig angeschlossener Polygonzug (toter Zug)<br />
y beidseitig angeschlossener Polygonzug<br />
y Einrechnungszug<br />
y Ringpolygon<br />
Wegen der fehlenden Kontrolle sollte ein einseitige angeschlossener Polygonzug<br />
nur in Ausnahmefällen angewendet werden (z.B. beim Tunnelvortrieb). Für die<br />
anderen Polygonzüge lassen sich Widersprüche berechnen, die zur Kontrolle und<br />
zur Beurteilung der Genauigkeit der neu polygonierten Punkte dienen. Zur<br />
Verdichtung eines bestehendes Netzes sind folgende wichtige Regeln im VP-Erlss<br />
(NRW) vorgeschrieben:<br />
y beidseitig angeschlossener Polygonzug<br />
y Zwangszentrierung<br />
y zweifache Streckenmessung mit einzuhaltender Fehlergrenze<br />
y Fehlergrenzen für den Winkelabschlussfehler und den Längs- und Querfehler<br />
x<br />
A<br />
Polygonzug mit n-Brechpunkten und 2 Anschlussrichtungen<br />
t A1 t nB<br />
Fernziel<br />
β1<br />
P1<br />
S1<br />
β2<br />
P2<br />
S2<br />
β3<br />
P3<br />
.....<br />
S3<br />
β<br />
n-1<br />
Pn-1<br />
Sn-1<br />
Beidseitig angeschlossener Polygonzug mit An- und Abschlussrichtungen<br />
29<br />
βn<br />
Pn<br />
B<br />
Fernziel<br />
y
3.1 Beidseitig angeschlossener Polygonzug<br />
Beim beidseitig angeschlossenen Polygonzug sind die Koordinaten des ersten und<br />
des letzten Standpunktes (P1, Pn) bekannt. Außerdem müssen die Koordinaten von<br />
zwei An- und Abschlusspunkten, i.d.R. Fernziele (A, B), gegeben sein.<br />
gegeben: Koordinaten von A, P1, P2, ... Pn, B<br />
gemessen: Brechungswinkel β1, β2, ... βn<br />
Strecken s1, s2, ... sn-1<br />
Anzahl der Messwerte: m = (n + n − 1) = (2 n − 1)<br />
gesucht: Koordinaten der neuen Zwischenpunkte P2, P3, Pn-1<br />
Anzahl der Unbekannten: u = 2 (n − 2)<br />
Anzahl der Freiheitsgrade: f = m − u = [2 n − 1] − [2 (n − 2)] = 3<br />
Î 1 Winkelwiderspruch, 2 Koordinatenwidersprüche berechenbar!<br />
Berechnungen:<br />
a) Richtungswinkel, Koordinatendifferenzen und Winkelabschlussfehler<br />
ti+1 = ti + i 200 Gon (+ w<br />
n ) 1)<br />
1): nur für den Fall zwangsfreier Anschlussrichtungen<br />
xi = s i cos ti<br />
yi = s i sin ti<br />
mit<br />
x i = x i+1 − x i<br />
y i = y i+1 − y i<br />
, i = 1, 2, ... n-1<br />
Die Richtungswinkel für die An- und Abschlussrichtungen berechnen sich wie folgt:<br />
tA1 = arctan y1 − yA<br />
x1 − xA<br />
tnB = arctan yB − yn<br />
xB − xn<br />
Der Winkelabschlussfehler (hier: Soll - Ist) berechnet sich nach:<br />
w¡<br />
w¡ = (tnB − t1A) − i n 200 Gon, i = 1, 2, .... , n<br />
Der Winkelabschlussfehler wird bei nicht zwangsfreien Anschlussrichtungen<br />
w¡<br />
nicht verteilt, sondern nur überprüft und mit einer zulässigen Fehlergrenze FW<br />
verglichen. Für Polygonzüge bis zu 2 km Länge (VP-Erlass NRW) ist folgende<br />
Fehlergrenze FW für den Winkelabschlussfehler einzuhalten:<br />
30
mit<br />
FW[cGon] = 1, 0 + 150<br />
[s[m]] (n − 1) n<br />
n: Anzahl der Brechungspunkte einschließlich des Anfangs- und Endpunktes<br />
Die Streckenmessung hat doppelt zu erfolgen, wobei folgende maximale Differenz<br />
Ds zwischen den beiden Streckenmessungen erlaubt ist:<br />
Ds[m] = 0, 02 + 0, 006 s[m]<br />
b) endgültige Koordinatenberechnung und Verteilung der Koordinatenwidersprüche<br />
Koordinatenwidersprüche wx, wy (auch hier im Sinne von Verbesserungen, Sollwert<br />
- Istwert):<br />
wx = (xn+1 − x1) − xi<br />
wy = (yn+1 − y1) − yi<br />
Verteilung der Koordinatenwidersprüche proportional zur Strecke si:<br />
xi+1 = xi + xi + wx<br />
[s]<br />
yi+1 = yi + yi + wy<br />
[s]<br />
si = xi + si cos ti + wx<br />
[s]<br />
si = yi + si sin ti + wy<br />
[s]<br />
Probe über Sollwerte des letzten Punktes x n<br />
y n<br />
!<br />
= x n ( S o l l )<br />
!<br />
= y n ( S o l l )<br />
, i = 1, 2, ... n-1<br />
c) Berechnung und Überprüfung von Quer- und Längsfehler (Q, L):<br />
x<br />
A<br />
P1<br />
t 1n<br />
P2<br />
Sollposition von Pn<br />
Istposition von Pn<br />
P3<br />
.....<br />
Zugrichtung -><br />
31<br />
wx<br />
Pn-1<br />
Pn<br />
wy<br />
L<br />
Q<br />
B<br />
y
Richtung des Polygonzuges: t1n = arctan yn−y1<br />
xn−x1<br />
Strecke zwischen P1 und Pn:S1n = (yn − y1 ) 2 + (xn − x1 ) 2<br />
Transformation der Koordinatenwidersprüche wx, wy in die Zugrichtung<br />
(Längskomponente L) und quer zur Zugrichtung (Querkomponente Q):<br />
oder<br />
L<br />
Q =<br />
cos t1n sin t1n<br />
− sin t1n cos t1n<br />
L = wx cos t1n + wy sin t1n<br />
Q = −wx sin t1n + wy cos t1n<br />
Für L und Q sind folgende Fehlergrenzen (FL, FQ) einzuhalten:<br />
wx<br />
wy<br />
FL[m] = 0, 06 + 0, 00015 S1n[m] + 0, 004 S1n[m]<br />
FQ[m] = 0, 06 + 0, 00007 S1n[m] + 0, 007 n n<br />
Für TP-Züge gilt laut TP-Erlass für die vorläufige Vorauswertung folgende<br />
Fehlergrenze:<br />
FL = 0.05 m<br />
FQ = 0.05 m<br />
3.2 Einrechnungszug<br />
In den o.a. Berechnungen zum beidseitig angeschlossenen Polyonzug wurden die<br />
Unsicherheiten der An- und Abschlussrichtungen nicht berücksichtigt. Die beiden<br />
Richtungen - in der Regel Fernziele - sind aus Koordinaten des Stand- und des<br />
Zielpunktes zu berechnen. Insbesondere in Netzen mit Netzspannungen können<br />
diese Richtungen den Winkelabschlussfehler ungünstig beeinflussen, so dass i.d.R.<br />
auf eine Verteilung des Winkelabschlussfehlers verzichtet wird (vgl. VP-Erlass).<br />
Beim Einrechnungszug, der einen langgestrecken Polygonzug voraussetzt, werden<br />
diese Nachteile umgangen, in dem auf dem ersten und dem letzten Punkt keine<br />
Anschlussrichtungen gemessen werden.<br />
gemessen: (n-1)- Strecken<br />
(n-2)- Winkel<br />
unbekannt: 2(n-2)- Koordinaten (x, y)<br />
Freiheitsgrade: (n-1) + (n-2) - 2(n-2) = 2n -3 - 2n + 4 = 1<br />
Der eine zur Verfügung stehende Freiheitsgrad wird hier in Form eines<br />
Maßstabsfaktors verwendet.<br />
32
P 1<br />
X<br />
t 1n<br />
α<br />
s 1<br />
Y'<br />
β 2<br />
P 2<br />
s 2<br />
β 3<br />
P 3<br />
s 3<br />
β 4<br />
P 4<br />
t'1n s 4<br />
β 5<br />
P 5<br />
s 5<br />
X'<br />
Polygonzug als Einrechnungszug<br />
β n-1<br />
s n-1<br />
Pn-1<br />
Der Einrechnungszug wird zunächst als normaler Polygonzug von P1 aus<br />
durchgerechnet, wobei die Richtung der ersten Polygonseite willkürlich mit α = 0<br />
Gon festgelegt wird. Wegen der undefinierten ersten Richtung erfolgt daher die<br />
Polygonzugberechnung in einem verdrehten Koordinatensystem X’, Y’. Nach der<br />
vorläufigen Durchrechnung des Polygonzuges erhält man die (vorläufigen)<br />
Koordinaten des letzten Punktes: xn, yn. Sowohl vom Anfangspunkt als auch vom<br />
letzten Punkt liegen nun die Koordinaten in zwei Systemen (System 1: X, Y; System<br />
2: X’, Y’) vor, aus denen sich die Richtungswinkel und Strecken vom Punkt P1 nach<br />
Pn berechnen wie folgt berechnen lassen:<br />
t1n = arctan yn − y1<br />
xn − x1<br />
s1n = (xn − x1) 2 + (yn − y1) 2<br />
¡<br />
t1n ¢<br />
s1n = arctan y ¢<br />
n<br />
¢<br />
= (xn ¢<br />
xn ¢<br />
− y1 ¢<br />
− x1 ¢<br />
− x1 ) 2 ¢<br />
+ (yn ¢<br />
− y1 ) 2<br />
Der eine noch zur Verfügung stehende Freiheitsgrad wird hier als Maßstabsfaktor<br />
verwertet. Dieser berechnet sich wie folgt:<br />
m = S1n<br />
£<br />
S1n Die endgültige Berechnung der Koordinaten sieht eine Verdrehung des Systems 2<br />
ins System1 und eine Maßstabskorrektur vor, wobei sich der Drehwinkel α wie folgt<br />
berechnet:<br />
¢<br />
= t12 − t12 Dieser Winkel wird nun zur Berechnung ersten Brechungswinkel β1 benutzt. Unter<br />
Berücksichtigung des Maßstabsfaktors und des neuen Brechungswinkels werden<br />
dann wie folgt die endgültigen Koordinaten berechnet:<br />
33<br />
P n<br />
Y
1 = 200 Gon<br />
t1 = 0 Gon<br />
Für i = 1 bis n-1:<br />
ti+1 = ti + i 200 Gon<br />
xi = m si cos ti<br />
yi = m si sin ti<br />
xi+1 = xi + xi = xi + m si cos ti<br />
yi+1 = yi + yi = yi + m si sin ti<br />
Wichtig: Abschlusskontrolle:<br />
x n<br />
y n<br />
!<br />
= x n ( S o l l )<br />
!<br />
= y n ( S o l l )<br />
3.3 Ringpolygon<br />
x i = x i+1 − x i<br />
mit , i = 1, 2, ... n-1<br />
y i = y i+1 − y i<br />
, i = 1, 2, ... n-1<br />
Ein Ringpolygon eignet sich insbesondere zur Absteckung eines örtlich begrenzten<br />
Objektes, z.B. Gebäude, Industrieanlage, etc., wenn die vorhandenen Punkte<br />
und/oder die Genauigkeit des vorhandenen amtlichen Koordinatensystems nicht<br />
ausreichen. Sämtliche Berechnungen und Absteckungen erfolgen in dem durch das<br />
Ringpolygon örtlich definierte Koordinatensystem. Der Bezug zu einem amtlichen<br />
Koordinatensystem kann später mittels einer Helmerttransformation über sog.<br />
identische Punkte herbeigeführt werden.<br />
Im Gegensatz zu einem einseitig angeschlossenen Polygonzug ist hier eine<br />
Kontrolle vorhanden, da der Polygonzug wieder am ersten Punkt endet. Über die<br />
Koordinaten des ersten Punktes und die Richtung der ersten Polygonseite kann hier<br />
willkürlich verfügt werden, z.B.<br />
x1 = 1000 m<br />
y1 = 2000 m<br />
t12 = 0 Gon G y2 = y1<br />
Zweckmäßigerweise sollte man die Koordinaten des Anfangspunktes aber so<br />
festlegen, dass keine negativen Koordinaten vorkommen und dass sich die x- und y-<br />
34
Koordinaten deutlich in ihren Werten unterscheiden. Bei einem Ringpolygon mit<br />
n-Punkten ergibt sich folgende Situation:<br />
gemessen: n - Strecken<br />
n- Winkel<br />
unbekannt: 2n - 3 - Koordinaten (x, y)<br />
Freiheitsgrade: n + n - 2n + 3 = 2n - 2n + 3 = 3<br />
Wie beim beidseitig angeschlossenen Polygonzug sind hier ein<br />
Winkelabschlussfehler sowie zwei Koordinatenabschlussfehler berechenbar und<br />
verteilbar.<br />
P<br />
2<br />
(X,0)<br />
S 1<br />
P 1<br />
Berechnungen:<br />
X<br />
β 2<br />
β 1<br />
S 2<br />
(2000 m,1000 m)<br />
S n<br />
β 3<br />
Messwerte: n- Brechungswinkel (b1, b2, ... bn) und<br />
n- Strecken (S1, S2, ... Sn)<br />
Anfangsrichtung (Standpunkt P1 zu Zielpunkt P2): t1 = 0 gon<br />
P 3<br />
β n<br />
weitere Richtungen (Standpunkt Pi zu Zielpunkt Pi+1 ):<br />
ti+1 = ti + i+1 + w<br />
n<br />
S 3<br />
P n<br />
Ringpolygon<br />
200 gon, i = 1, 2, 3, 4, ..., n mit tn+1 = t1 ! = 0 gon<br />
und n+1 = 1<br />
35<br />
Y
mit dem Winkelabschlussfehler: w = (tn+1 − t1) − ( + n 200 gon<br />
Koordinatenberechnungen:<br />
Xi = Si cos ti<br />
Yi = Si sin ti<br />
mit<br />
Koordinatenwidersprüche:<br />
Soll = 0 gon Ist (-x 400 gon)<br />
Xi = Xi+1 − Xi<br />
Yi = Yi+1 − Yi<br />
X ! = Xn+1 − X1 = 0 − 0 = 0<br />
Y ! = Yn+1 − Y1 = 0 − 0 = 0 H<br />
, i = 1, 2, 3, ..., n mit Xn+1 = X1 ! = 0<br />
Yn+1 = Y1 ! = 0<br />
wx = 0 − X<br />
wy = 0 − Y<br />
Endgültige Koordinaten und Kontrolle (wichtig!):<br />
Xi+1 = Xi + Si cos ti + wx<br />
[S] Si<br />
Yi+1 = Yi + Si sin ti + wy<br />
[S] Si<br />
(Verbesserung = Soll - Ist)<br />
, i = 1, 2, 3, ...n Kontrolle : Xn+1 = X1 = 0 !<br />
Yn+1 = Y1 = 0 !<br />
36