

Aufzeichungen zur Schiffssicherheit - Institut für Entwerfen von ...
Aufzeichungen zur Schiffssicherheit - Institut für Entwerfen von ...
Aufzeichungen zur Schiffssicherheit - Institut für Entwerfen von ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5.4 Parametrisches Rollen in Längssee<br />
h<br />
WL-Flächen<br />
WT<br />
WB<br />
WT (Wellental)<br />
Schwankungsbereich<br />
WB (Wellenberg)<br />
ϕ<br />
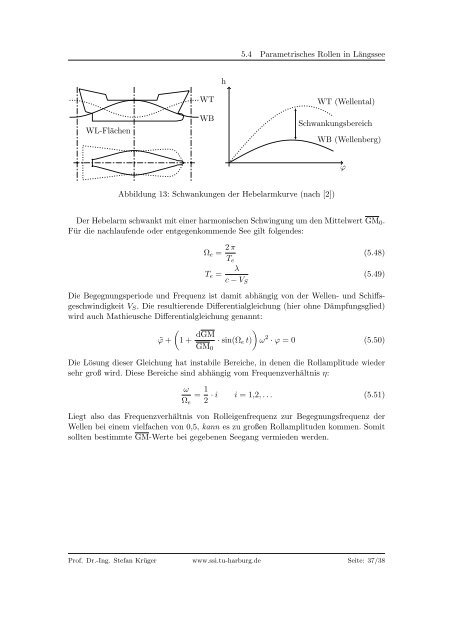
Abbildung 13: Schwankungen der Hebelarmkurve (nach [2])<br />
Der Hebelarm schwankt mit einer harmonischen Schwingung um den Mittelwert GM 0 .<br />
Für die nachlaufende oder entgegenkommende See gilt folgendes:<br />
Ω e = 2 π<br />
T e<br />
(5.48)<br />
T e =<br />
λ<br />
c − V S<br />
(5.49)<br />
Die Begegnungsperiode und Frequenz ist damit abhängig <strong>von</strong> der Wellen- und Schiffsgeschwindigkeit<br />
V S . Die resultierende Differentialgleichung (hier ohne Dämpfungsglied)<br />
wird auch Mathieusche Differentialgleichung genannt:<br />
(<br />
¨ϕ + 1 + dGM )<br />
· sin(Ω e t) ω 2 · ϕ = 0 (5.50)<br />
GM 0<br />
Die Lösung dieser Gleichung hat instabile Bereiche, in denen die Rollamplitude wieder<br />
sehr groß wird. Diese Bereiche sind abhängig vom Frequenzverhältnis η:<br />
ω<br />
= 1 · i i = 1,2, . . . (5.51)<br />
Ω e 2<br />
Liegt also das Frequenzverhältnis <strong>von</strong> Rolleigenfrequenz <strong>zur</strong> Begegnungsfrequenz der<br />
Wellen bei einem vielfachen <strong>von</strong> 0,5, kann es zu großen Rollamplituden kommen. Somit<br />
sollten bestimmte GM-Werte bei gegebenen Seegang vermieden werden.<br />
Prof. Dr.-Ing. Stefan Krüger www.ssi.tu-harburg.de Seite: 37/38














