

KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>KUKA</strong> <strong>Posiflex</strong><br />
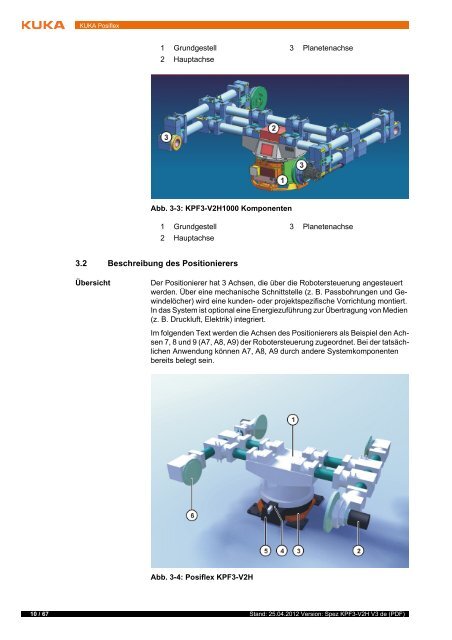
1 Grundgestell 3 Planetenachse<br />
2 Hauptachse<br />
Abb. 3-3: KPF3-V2H1000 Komponenten<br />
1 Grundgestell 3 Planetenachse<br />
2 Hauptachse<br />
3.2 Beschreibung des Positionierers<br />
Übersicht<br />
Der Positionierer hat 3 Achsen, die über die Robotersteuerung angesteuert<br />
werden. Über eine mechanische Schnittstelle (z. B. Passbohrungen und Gewindelöcher)<br />
wird eine kunden- oder projektspezifische Vorrichtung montiert.<br />
In das System ist optional eine Energiezuführung zur Übertragung von Medien<br />
(z. B. Druckluft, Elektrik) integriert.<br />
Im folgenden Text werden die Achsen des Positionierers als Beispiel den Achsen<br />
7, 8 und 9 (A7, A8, A9) der Robotersteuerung zugeordnet. Bei der tatsächlichen<br />
Anwendung können A7, A8, A9 durch andere Systemkomponenten<br />
bereits belegt sein.<br />
Abb. 3-4: <strong>Posiflex</strong> KPF3-V2H<br />
10 / 67 Stand: 25.04.2012 Version: Spez KPF3-V2H V3 de (PDF)














