

KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics
KUKA Posiflex - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5 Sicherheit<br />
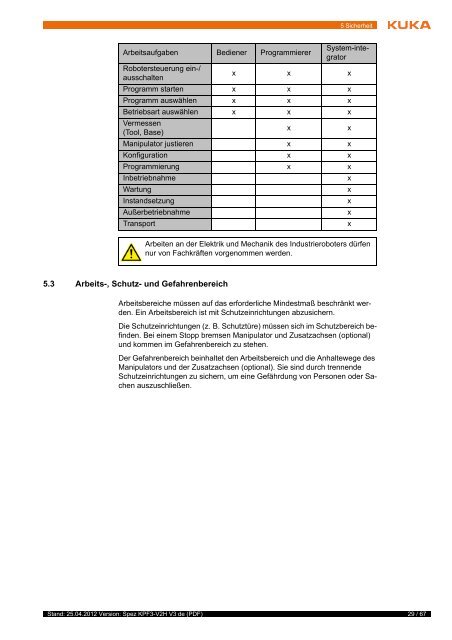
Arbeitsaufgaben Bediener Programmierer<br />
Robotersteuerung ein-/<br />
ausschalten<br />
System-integrator<br />
x x x<br />
Programm starten x x x<br />
Programm auswählen x x x<br />
Betriebsart auswählen x x x<br />
Vermessen<br />
(Tool, Base)<br />
Manipulator justieren x x<br />
Konfiguration x x<br />
Programmierung x x<br />
Inbetriebnahme<br />
Wartung<br />
Instandsetzung<br />
Außerbetriebnahme<br />
Transport<br />
Arbeiten an der Elektrik und Mechanik des Industrieroboters dürfen<br />
nur von Fachkräften vorgenommen werden.<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
x<br />
5.3 Arbeits-, Schutz- und Gefahrenbereich<br />
Arbeitsbereiche müssen auf das erforderliche Mindestmaß beschränkt werden.<br />
Ein Arbeitsbereich ist mit Schutzeinrichtungen abzusichern.<br />
Die Schutzeinrichtungen (z. B. Schutztüre) müssen sich im Schutzbereich befinden.<br />
Bei einem Stopp bremsen Manipulator und Zusatzachsen (optional)<br />
und kommen im Gefahrenbereich zu stehen.<br />
Der Gefahrenbereich beinhaltet den Arbeitsbereich und die Anhaltewege des<br />
Manipulators und der Zusatzachsen (optional). Sie sind durch trennende<br />
Schutzeinrichtungen zu sichern, um eine Gefährdung von Personen oder Sachen<br />
auszuschließen.<br />
Stand: 25.04.2012 Version: Spez KPF3-V2H V3 de (PDF)<br />
29 / 67














