

KR 5 sixx R650 WP, Roboter - KUKA Robotics
KR 5 sixx R650 WP, Roboter - KUKA Robotics
KR 5 sixx R650 WP, Roboter - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3 Sicherheit<br />
Unterbrechungen des Sicherheitskreises schaltet die Spannungsversorgung<br />
der Antriebe ab und bewirkt somit ein Stillsetzen des Industrieroboters.<br />
Je nach der Betriebsart, in der der Industrieroboter betrieben wird, löst die Sicherheitslogik<br />
ESC unterschiedliche Stopp-Reaktionen aus.<br />
Die Sicherheitslogik ESC überwacht folgende Eingänge:<br />
• Bedienerschutz<br />
• Lokaler NOT-HALT (= NOT-HALT-Taster am KCP)<br />
• Externer NOT-HALT<br />
• Zustimmeinrichtung<br />
• Betriebsarten<br />
• Qualifizierende Eingänge<br />
3.5.3 Betriebsarten-Wahlschalter<br />
Der Industrieroboter kann in folgenden Betriebsarten betrieben werden:<br />
• Manuell Reduzierte Geschwindigkeit (T1)<br />
• Manuell Hohe Geschwindigkeit (T2)<br />
• Automatik (AUT)<br />
• Automatik Extern (AUT EXT)<br />
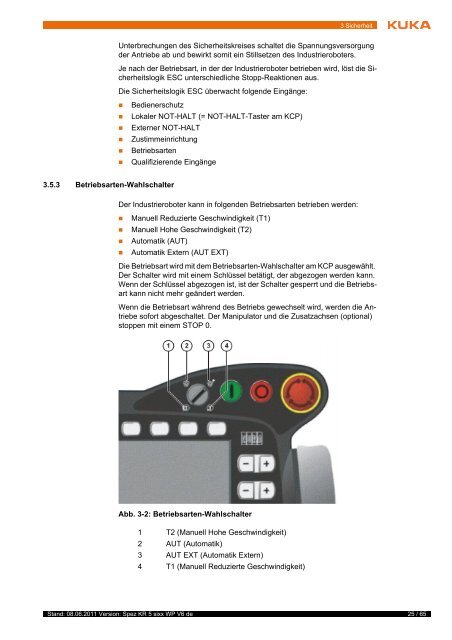
Die Betriebsart wird mit dem Betriebsarten-Wahlschalter am KCP ausgewählt.<br />
Der Schalter wird mit einem Schlüssel betätigt, der abgezogen werden kann.<br />
Wenn der Schlüssel abgezogen ist, ist der Schalter gesperrt und die Betriebsart<br />
kann nicht mehr geändert werden.<br />
Wenn die Betriebsart während des Betriebs gewechselt wird, werden die Antriebe<br />
sofort abgeschaltet. Der Manipulator und die Zusatzachsen (optional)<br />
stoppen mit einem STOP 0.<br />
Abb. 3-2: Betriebsarten-Wahlschalter<br />
1 T2 (Manuell Hohe Geschwindigkeit)<br />
2 AUT (Automatik)<br />
3 AUT EXT (Automatik Extern)<br />
4 T1 (Manuell Reduzierte Geschwindigkeit)<br />
Stand: 08.06.2011 Version: Spez <strong>KR</strong> 5 <strong>sixx</strong> <strong>WP</strong> V6 de<br />
25 / 65














