

KR 5 sixx R650 WP, Roboter - KUKA Robotics
KR 5 sixx R650 WP, Roboter - KUKA Robotics
KR 5 sixx R650 WP, Roboter - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4 Planung<br />
4 Planung<br />
4.1 Fundamentbefestigung<br />
Beschreibung<br />
Der <strong>Roboter</strong> wird direkt auf dem Fundament mit 4 Schrauben befestigt. Als<br />
Fundament kann eine entsprechend Stahlkonstruktion eingesetzt werden. Die<br />
Befestigungsfläche muss mindestens 20 mm dick sein. Die Stahlkonstruktion<br />
muss sicherstellen, dass die auftretenden dynamischen Kräfte<br />
(>>> 2.4 "Fundamentlasten" Seite 14) sicher und dauerhaft aufgenommen<br />
werden.<br />
Um den <strong>Roboter</strong> auf einem Betonfundament zu befestigen, muss eine entsprechende<br />
Stahlplatte angefertigt werden, die dann mit dem Betonfundament<br />
verbunden wird.<br />
Die Verbindungsleitungen zur <strong>Roboter</strong>steuerung müssen in einem Kabelkanal<br />
verlegt werden. Bei Bedarf müssen zusätzliche Massnahmen zur EMV-Verträglichkeit<br />
getroffen werden.<br />
Bei Aufstellung, Anschluss und Inbetriebnahme des <strong>Roboter</strong>s müssen<br />
die landesspezifischen Vorschriften und Gesetze beachtet werden.<br />
Der <strong>Roboter</strong> darf nur in Betrieb genommen werden, wenn die geltenden Vorschriften<br />
eingehalten worden sind.<br />
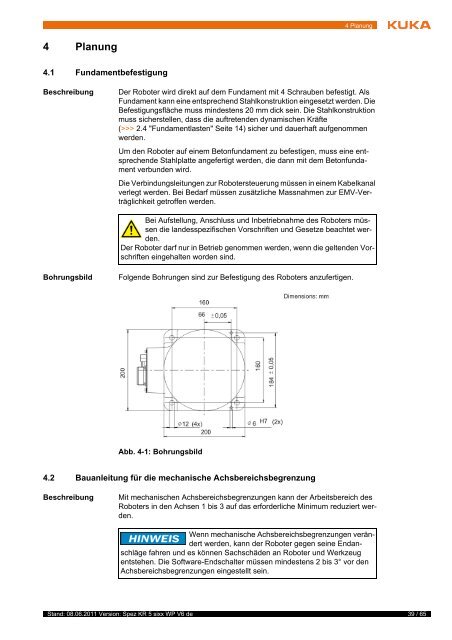
Bohrungsbild<br />
Folgende Bohrungen sind zur Befestigung des <strong>Roboter</strong>s anzufertigen.<br />
Abb. 4-1: Bohrungsbild<br />
4.2 Bauanleitung für die mechanische Achsbereichsbegrenzung<br />
Beschreibung<br />
Mit mechanischen Achsbereichsbegrenzungen kann der Arbeitsbereich des<br />
<strong>Roboter</strong>s in den Achsen 1 bis 3 auf das erforderliche Minimum reduziert werden.<br />
Wenn mechanische Achsbereichsbegrenzungen verändert<br />
werden, kann der <strong>Roboter</strong> gegen seine Endanschläge<br />
fahren und es können Sachschäden an <strong>Roboter</strong> und Werkzeug<br />
entstehen. Die Software-Endschalter müssen mindestens 2 bis 3° vor den<br />
Achsbereichsbegrenzungen eingestellt sein.<br />
Stand: 08.06.2011 Version: Spez <strong>KR</strong> 5 <strong>sixx</strong> <strong>WP</strong> V6 de<br />
39 / 65














