

Bachelorarbeit Chris Bauer - Geothermie Wiki - zwerg - KIT
Bachelorarbeit Chris Bauer - Geothermie Wiki - zwerg - KIT
Bachelorarbeit Chris Bauer - Geothermie Wiki - zwerg - KIT

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
7.1. Inbetriebnahme einzelner Module<br />
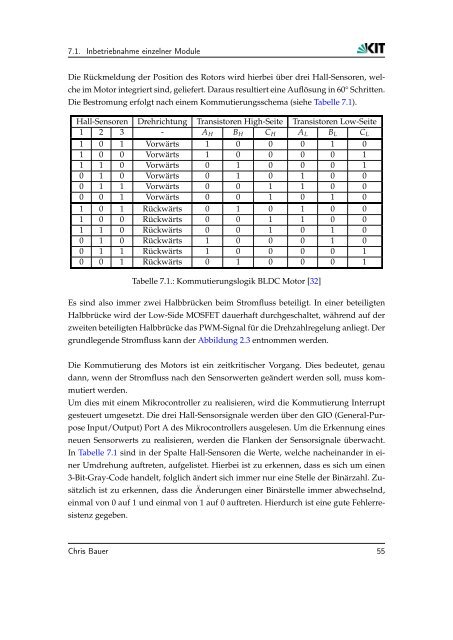
Die Rückmeldung der Position des Rotors wird hierbei über drei Hall-Sensoren, wel-<br />
che im Motor integriert sind, geliefert. Daraus resultiert eine Auflösung in 60° Schritten.<br />
Die Bestromung erfolgt nach einem Kommutierungsschema (siehe Tabelle 7.1).<br />
Hall-Sensoren Drehrichtung Transistoren High-Seite Transistoren Low-Seite<br />
1 2 3 - AH BH CH AL BL CL<br />
1 0 1 Vorwärts 1 0 0 0 1 0<br />
1 0 0 Vorwärts 1 0 0 0 0 1<br />
1 1 0 Vorwärts 0 1 0 0 0 1<br />
0 1 0 Vorwärts 0 1 0 1 0 0<br />
0 1 1 Vorwärts 0 0 1 1 0 0<br />
0 0 1 Vorwärts 0 0 1 0 1 0<br />
1 0 1 Rückwärts 0 1 0 1 0 0<br />
1 0 0 Rückwärts 0 0 1 1 0 0<br />
1 1 0 Rückwärts 0 0 1 0 1 0<br />
0 1 0 Rückwärts 1 0 0 0 1 0<br />
0 1 1 Rückwärts 1 0 0 0 0 1<br />
0 0 1 Rückwärts 0 1 0 0 0 1<br />
Tabelle 7.1.: Kommutierungslogik BLDC Motor [32]<br />
Es sind also immer zwei Halbbrücken beim Stromfluss beteiligt. In einer beteiligten<br />
Halbbrücke wird der Low-Side MOSFET dauerhaft durchgeschaltet, während auf der<br />
zweiten beteiligten Halbbrücke das PWM-Signal für die Drehzahlregelung anliegt. Der<br />
grundlegende Stromfluss kann der Abbildung 2.3 entnommen werden.<br />
Die Kommutierung des Motors ist ein zeitkritischer Vorgang. Dies bedeutet, genau<br />
dann, wenn der Stromfluss nach den Sensorwerten geändert werden soll, muss kom-<br />
mutiert werden.<br />
Um dies mit einem Mikrocontroller zu realisieren, wird die Kommutierung Interrupt<br />
gesteuert umgesetzt. Die drei Hall-Sensorsignale werden über den GIO (General-Pur-<br />
pose Input/Output) Port A des Mikrocontrollers ausgelesen. Um die Erkennung eines<br />
neuen Sensorwerts zu realisieren, werden die Flanken der Sensorsignale überwacht.<br />
In Tabelle 7.1 sind in der Spalte Hall-Sensoren die Werte, welche nacheinander in ei-<br />
ner Umdrehung auftreten, aufgelistet. Hierbei ist zu erkennen, dass es sich um einen<br />
3-Bit-Gray-Code handelt, folglich ändert sich immer nur eine Stelle der Binärzahl. Zu-<br />
sätzlich ist zu erkennen, dass die Änderungen einer Binärstelle immer abwechselnd,<br />
einmal von 0 auf 1 und einmal von 1 auf 0 auftreten. Hierdurch ist eine gute Fehlerre-<br />
sistenz gegeben.<br />
<strong>Chris</strong> <strong>Bauer</strong> 55




