

Pioneer 3™ Operations Manual
Pioneer 3™ Operations Manual
Pioneer 3™ Operations Manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Advanced Robot Control & <strong>Operations</strong> Software<br />
checksum. It is up to the client to parse the packets, sorted by type for content. Please<br />
consult the respective client application programming manuals for details.<br />
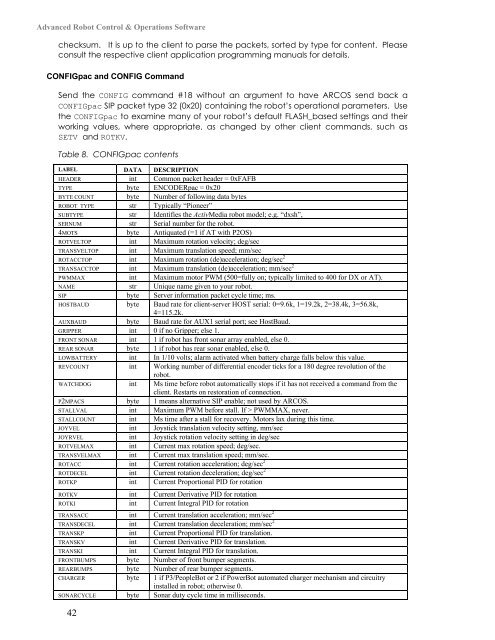
CONFIGpac and CONFIG Command<br />
Send the CONFIG command #18 without an argument to have ARCOS send back a<br />
CONFIGpac SIP packet type 32 (0x20) containing the robot’s operational parameters. Use<br />
the CONFIGpac to examine many of your robot’s default FLASH_based settings and their<br />
working values, where appropriate, as changed by other client commands, such as<br />
SETV and ROTKV.<br />
Table 8. CONFIGpac contents<br />
LABEL DATA DESCRIPTION<br />
HEADER int Common packet header = 0xFAFB<br />
TYPE byte ENCODERpac = 0x20<br />
BYTE COUNT byte Number of following data bytes<br />
ROBOT TYPE str Typically “<strong>Pioneer</strong>”<br />
SUBTYPE str Identifies the ActivMedia robot model; e.g. “dxsh”,<br />
SERNUM str Serial number for the robot.<br />
4MOTS byte Antiquated (=1 if AT with P2OS)<br />
ROTVELTOP int Maximum rotation velocity; deg/sec<br />
TRANSVELTOP int Maximum translation speed; mm/sec<br />
ROTACCTOP int Maximum rotation (de)acceleration; deg/sec 2<br />
TRANSACCTOP int Maximum translation (de)acceleration; mm/sec 2<br />
PWMMAX int Maximum motor PWM (500=fully on; typically limited to 400 for DX or AT).<br />
NAME str Unique name given to your robot.<br />
SIP byte Server information packet cycle time; ms.<br />
HOSTBAUD byte Baud rate for client-server HOST serial: 0=9.6k, 1=19.2k, 2=38.4k, 3=56.8k,<br />
4=115.2k.<br />
AUXBAUD byte Baud rate for AUX1 serial port; see HostBaud.<br />
GRIPPER int 0 if no Gripper; else 1.<br />
FRONT SONAR int 1 if robot has front sonar array enabled, else 0.<br />
REAR SONAR byte 1 if robot has rear sonar enabled, else 0.<br />
LOWBATTERY int In 1/10 volts; alarm activated when battery charge falls below this value.<br />
REVCOUNT int Working number of differential encoder ticks for a 180 degree revolution of the<br />
robot.<br />
WATCHDOG int Ms time before robot automatically stops if it has not received a command from the<br />
client. Restarts on restoration of connection.<br />
P2MPACS byte 1 means alternative SIP enable; not used by ARCOS.<br />
STALLVAL int Maximum PWM before stall. If > PWMMAX, never.<br />
STALLCOUNT int Ms time after a stall for recovery. Motors lax during this time.<br />
JOYVEL int Joystick translation velocity setting, mm/sec<br />
JOYRVEL int Joystick rotation velocity setting in deg/sec<br />
ROTVELMAX int Current max rotation speed; deg/sec.<br />
TRANSVELMAX int Current max translation speed; mm/sec.<br />
ROTACC int Current rotation acceleration; deg/sec 2<br />
ROTDECEL int Current rotation deceleration; deg/sec 2<br />
ROTKP int Current Proportional PID for rotation<br />
ROTKV int Current Derivative PID for rotation<br />
ROTKI int Current Integral PID for rotation<br />
TRANSACC int Current translation acceleration; mm/sec 2<br />
TRANSDECEL int Current translation deceleration; mm/sec 2<br />
TRANSKP int Current Proportional PID for translation.<br />
TRANSKV int Current Derivative PID for translation.<br />
TRANSKI int Current Integral PID for translation.<br />
FRONTBUMPS byte Number of front bumper segments.<br />
REARBUMPS byte Number of rear bumper segments.<br />
CHARGER byte 1 if P3/PeopleBot or 2 if PowerBot automated charger mechanism and circuitry<br />
installed in robot; otherwise 0.<br />
SONARCYCLE byte Sonar duty cycle time in milliseconds.<br />
42














