ABB ACH550 - Full Version - Enervex
ABB ACH550 - Full Version - Enervex
ABB ACH550 - Full Version - Enervex

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
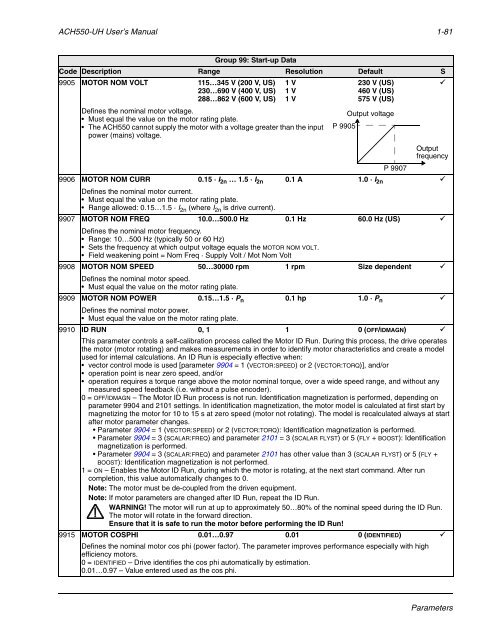
<strong>ACH550</strong>-UH User’s Manual 1-81<br />
Group 99: Start-up Data<br />
Code Description Range Resolution Default S<br />
9905 MOTOR NOM VOLT 115…345 V (200 V, US) 1 V 230 V (US) <br />
230…690 V (400 V, US) 1 V 460 V (US)<br />
288…862 V (600 V, US) 1 V 575 V (US)<br />
Defines the nominal motor voltage.<br />
Output voltage<br />
• Must equal the value on the motor rating plate.<br />
• The <strong>ACH550</strong> cannot supply the motor with a voltage greater than the input P 9905<br />
power (mains) voltage.<br />
Output<br />
frequency<br />
P 9907<br />
9906 MOTOR NOM CURR 0.15 · I 2n … 1.5 · I 2n 0.1 A 1.0 · I 2n <br />
Defines the nominal motor current.<br />
• Must equal the value on the motor rating plate.<br />
• Range allowed: 0.15…1.5 · I 2n (where I 2n is drive current).<br />
9907 MOTOR NOM FREQ 10.0…500.0 Hz 0.1 Hz 60.0 Hz (US) <br />
Defines the nominal motor frequency.<br />
• Range: 10…500 Hz (typically 50 or 60 Hz)<br />
• Sets the frequency at which output voltage equals the MOTOR NOM VOLT.<br />
• Field weakening point = Nom Freq · Supply Volt / Mot Nom Volt<br />
9908 MOTOR NOM SPEED 50…30000 rpm 1 rpm Size dependent <br />
Defines the nominal motor speed.<br />
• Must equal the value on the motor rating plate.<br />
9909 MOTOR NOM POWER 0.15…1.5 · P n 0.1 hp 1.0 · P n <br />
Defines the nominal motor power.<br />
• Must equal the value on the motor rating plate.<br />
9910 ID RUN 0, 1 1 0 (OFF/IDMAGN) <br />
This parameter controls a self-calibration process called the Motor ID Run. During this process, the drive operates<br />
the motor (motor rotating) and makes measurements in order to identify motor characteristics and create a model<br />
used for internal calculations. An ID Run is especially effective when:<br />
• vector control mode is used [parameter 9904 = 1 (VECTOR:SPEED) or 2 (VECTOR:TORQ)], and/or<br />
• operation point is near zero speed, and/or<br />
• operation requires a torque range above the motor nominal torque, over a wide speed range, and without any<br />
measured speed feedback (i.e. without a pulse encoder).<br />
0 = OFF/IDMAGN – The Motor ID Run process is not run. Identification magnetization is performed, depending on<br />
parameter 9904 and 2101 settings. In identification magnetization, the motor model is calculated at first start by<br />
magnetizing the motor for 10 to 15 s at zero speed (motor not rotating). The model is recalculated always at start<br />
after motor parameter changes.<br />
• Parameter 9904 = 1 (VECTOR:SPEED) or 2 (VECTOR:TORQ): Identification magnetization is performed.<br />
• Parameter 9904 = 3 (SCALAR:FREQ) and parameter 2101 = 3 (SCALAR FLYST) or 5 (FLY + BOOST): Identification<br />
magnetization is performed.<br />
• Parameter 9904 = 3 (SCALAR:FREQ) and parameter 2101 has other value than 3 (SCALAR FLYST) or 5 (FLY +<br />
BOOST): Identification magnetization is not performed.<br />
1 = ON – Enables the Motor ID Run, during which the motor is rotating, at the next start command. After run<br />
completion, this value automatically changes to 0.<br />
Note: The motor must be de-coupled from the driven equipment.<br />
Note: If motor parameters are changed after ID Run, repeat the ID Run.<br />
WARNING! The motor will run at up to approximately 50…80% of the nominal speed during the ID Run.<br />
The motor will rotate in the forward direction.<br />
Ensure that it is safe to run the motor before performing the ID Run!<br />
9915 MOTOR COSPHI 0.01…0.97 0.01 0 (IDENTIFIED) <br />
Defines the nominal motor cos phi (power factor). The parameter improves performance especially with high<br />
efficiency motors.<br />
0 = IDENTIFIED – Drive identifies the cos phi automatically by estimation.<br />
0.01…0.97 – Value entered used as the cos phi.<br />
Parameters